Clustering and Mixture Models¶
Clustering and Mixture Models¶
04/06/20
Andreas C. Müller
Today we’re gonna talk about clustering and mixture models, mostly clustering algorithms.
FIXME: ‘real world’ examples? Usecases, better motivation? FIXME: illustration of Kmeans++ FIXME: linkage explanation diagram FIXME: cluster sized in particularly good for dbscan (what did I mean?) debugging (what did I mean?!)
Clustering¶
.center[
 ]
]
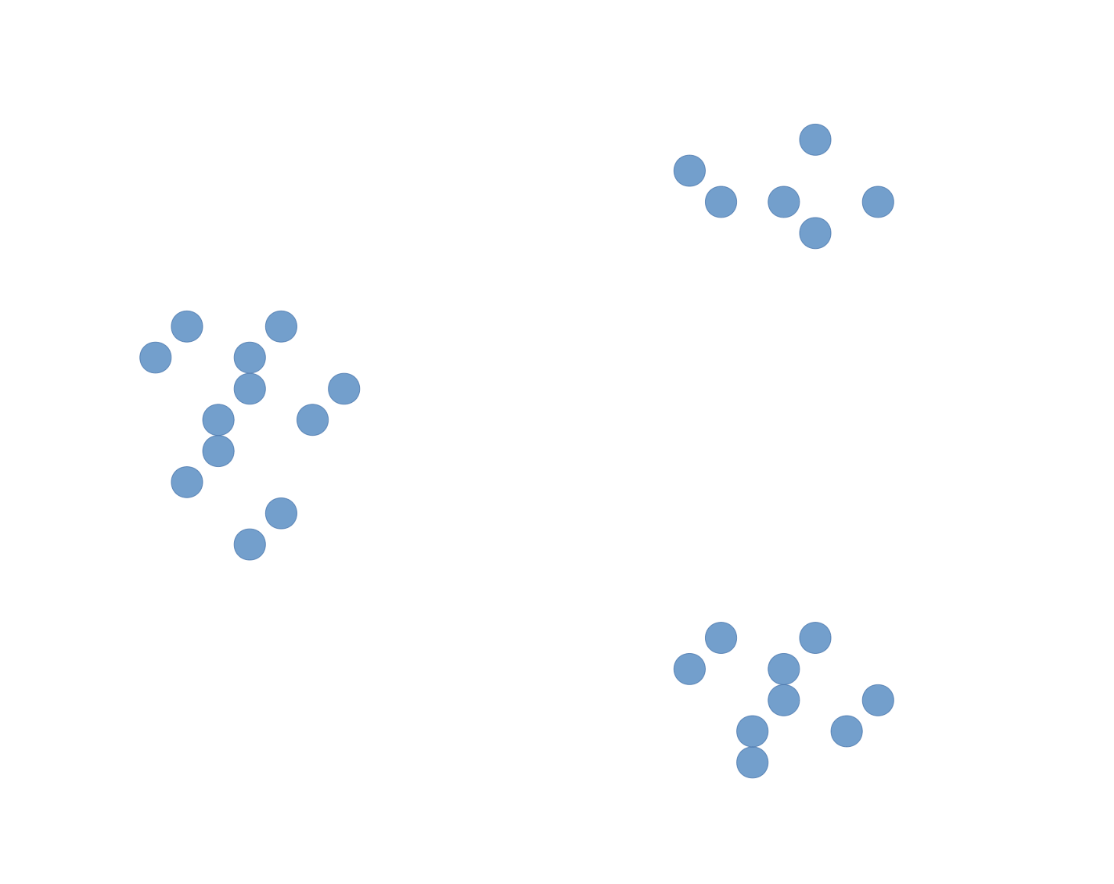
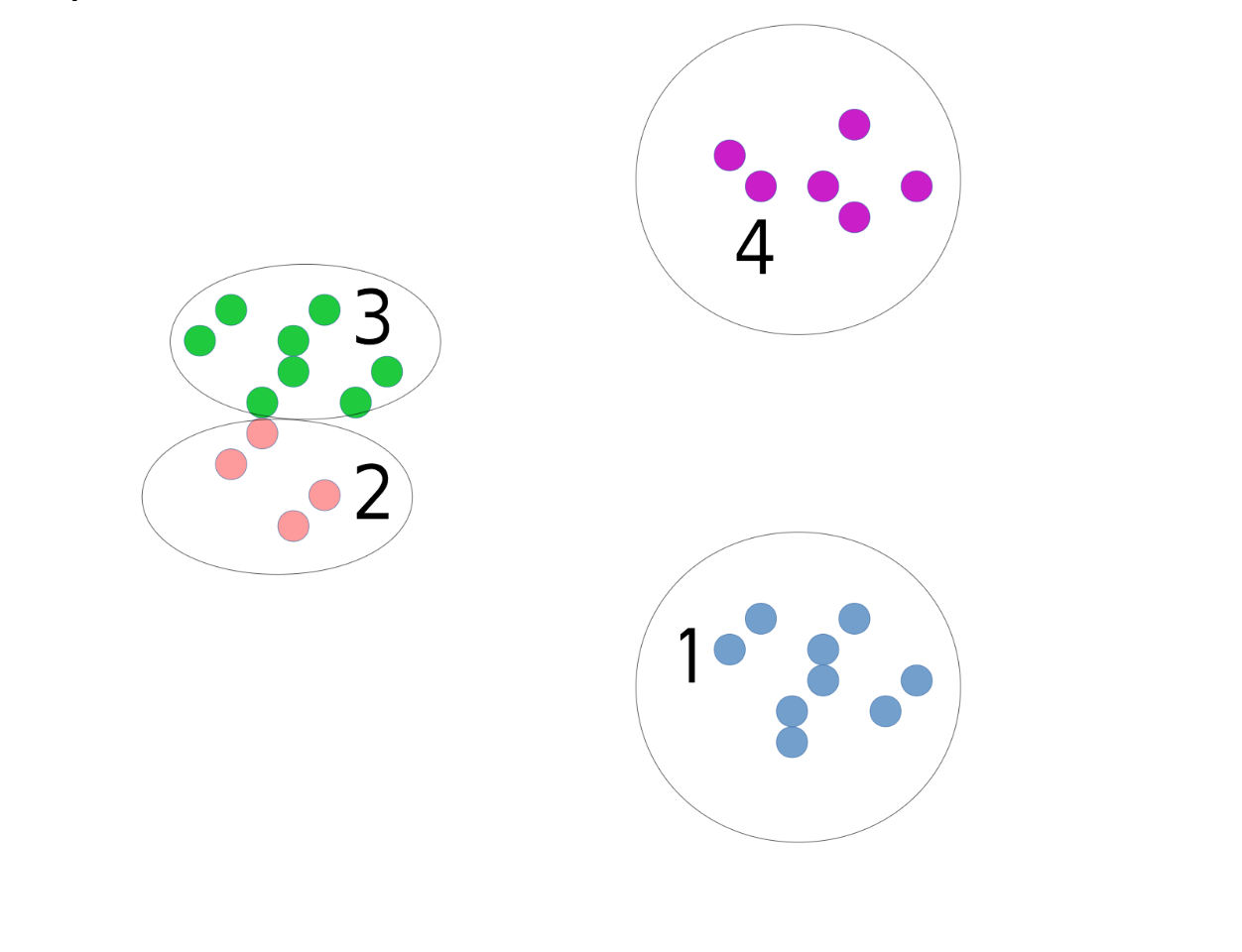
The ideas is that you start out with a bunch of data points, and the assumption is that they fall into groups or clusters, and the goal is to discover these underlying groups.
.center[
 ]
]
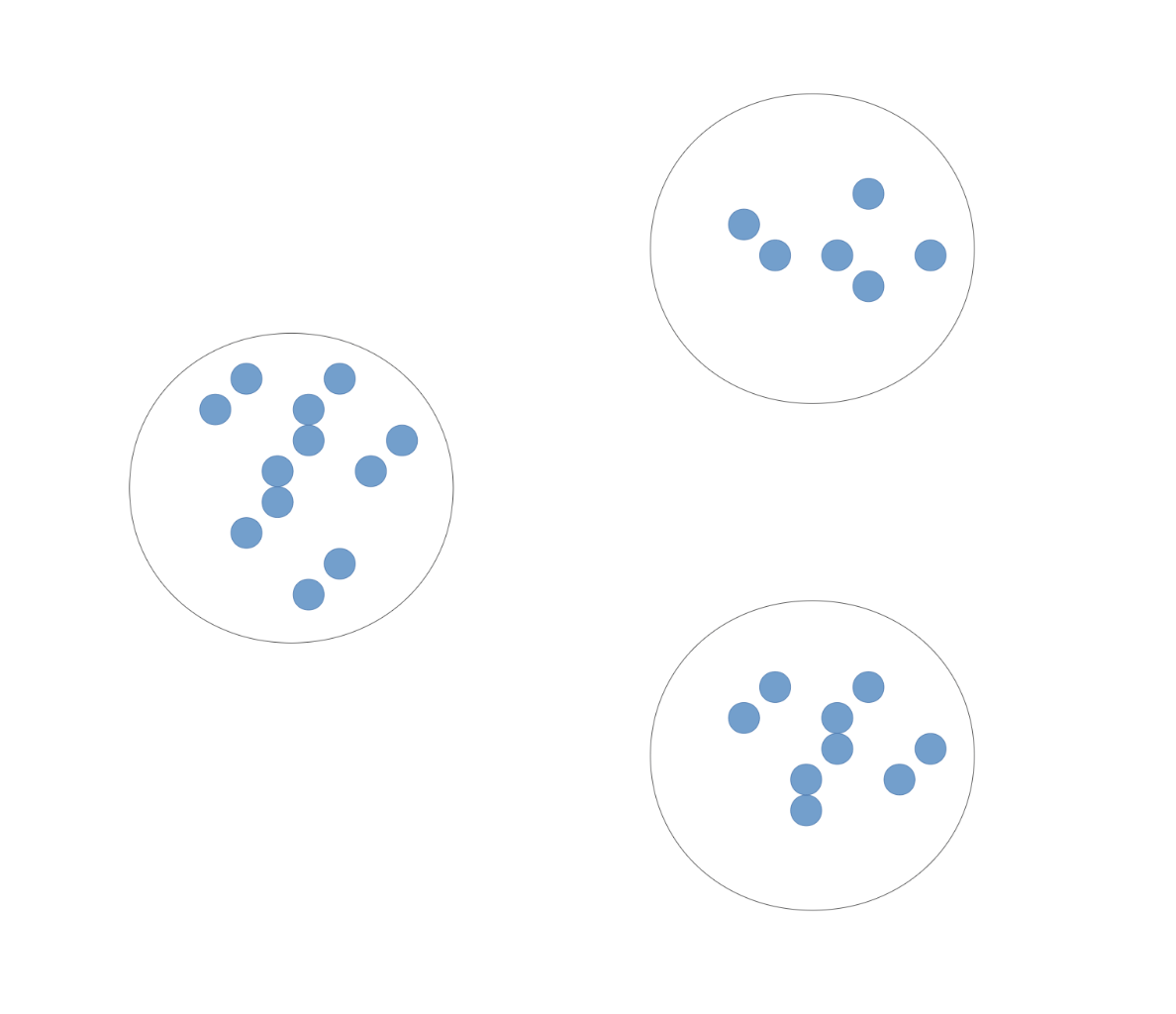
For example you want to find that these points belong to the same groups, and these, and these.
.center[
 ]
]
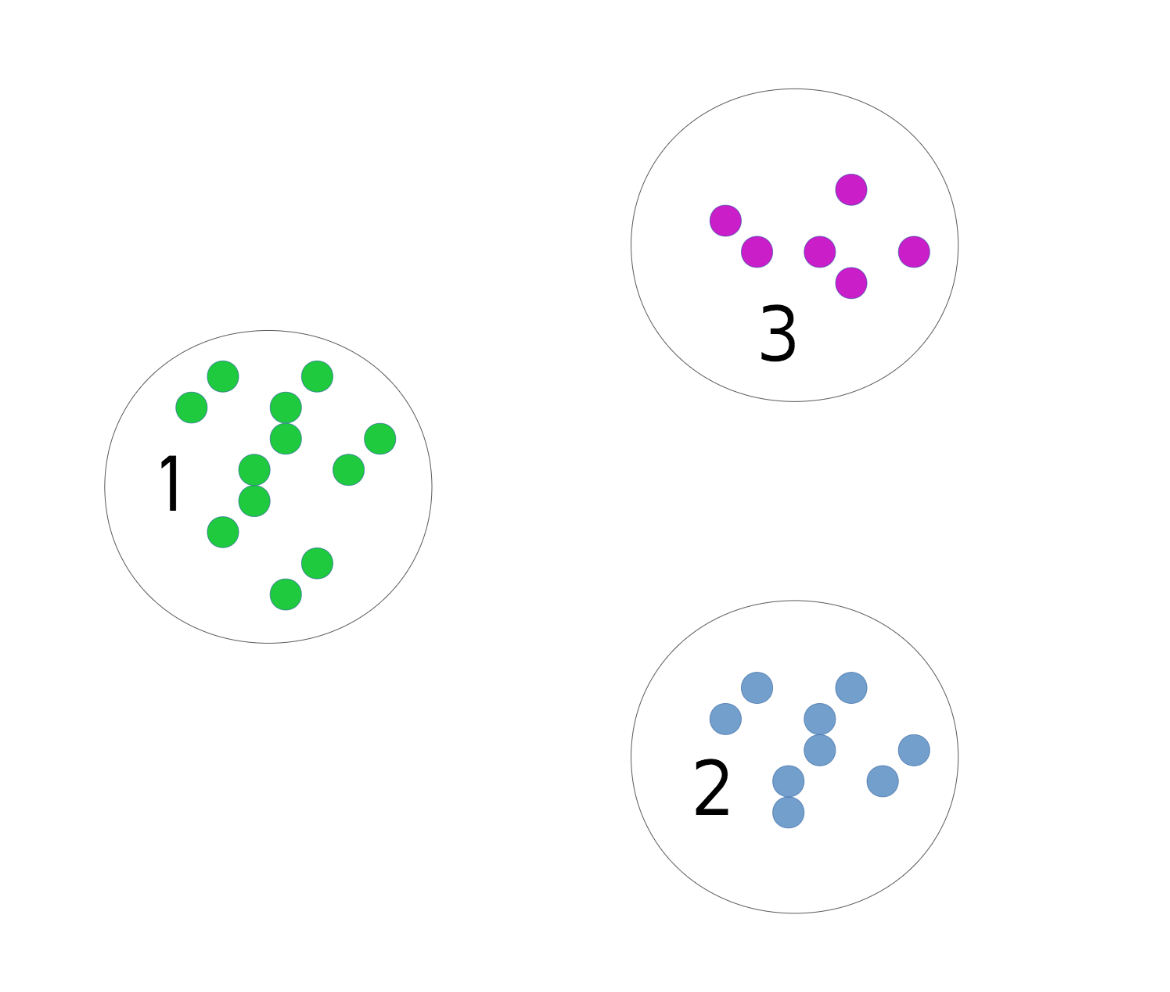
Usually the clusters are identified by a cluster label or cluster indicator, though these numbers are arbitrary. What you care about is which points belong to the same cluster. So I could relabel the clusters and this would still be considered the same clustering.
What we’re really interested in is the partitioning of the data, though the way it’s implemented in the scikit-learn API is that you predict an integer for each data point, so the clusters are numbered 0.. n_clusters -1. So we’d label these points with 0, these with one, and so on. But you should keep in mind that the number themselves have no meaning, renumbering the clusters corresponds to the same clustering. We’re really only interested in which points have the same labels and which points have different labels.
Clustering¶
Partition data into groups (clusters)
Points within a cluster should be “similar”.
Points in different cluster should be “different”.
So you want to partition the data, so that each data point belongs to exactly one of the groups. And you want to define groups such that points in the same cluster are similar, and points in different clusters are different. And the different algorithms define how they measure similarity in different ways.
Number of clusters might be pre-specified. - Notations of “similar” and “different” depend on algorithm or user specified metrics.
Identify groups by assigning “cluster labels” to each data point. FIXME!
.center[
]
The cluster algorithms have many parameters, and one of the most common ones is the number of clusters. In this dataset I drew here, it’s quite obvious that there are three groups, and if it’s this obvious there is usually a way to figure out how many groups there are. But for many algorithms, you need to specify the number of groups in advance.
.center[
 ]
]
Group into 4 clusters
If you misspecify the number of groups you’d get something like this. To pick the number of clusters, in general you either need to have some prior knowledge about the data, or you need to inspect the results manually to see if the parameters are good.
Often, you don’t know the number of clusters, or if there are even clusters in the data. Very rarely is the case as clear as in this example. Still there might be a reasonable grouping, so there is no “right” amount of clusters, but you might still get something out of the clustering.
Goals of Clustering¶
Data Exploration
Are there coherent groups ?
How many groups are there ?
So why would we want to use a clustering algorithm? The main usage that I’ve come across is exporation of the data and understanding the structure of the data. Are there similar groups within the data? What are these? How many are there? You can also use clustering to summarize or compress the data by representing each group by a single prototype, say the center. You can also use clustering if you want to divide your data, for example if you want to know different parts of the dataset behave fundamentally differently, so you could for example cluster a dataset, and then apply, say, a linear model, to each cluster. That would create a more powerfull model than just learning a linear model on the whole dataset.
–
Data Partitioning
Divide data by group before further processing
–
Unsupervised feature extraction
Derive features from clusters or cluster distances
Another use is unsupervised feature extraction. You can also use clustering to derive a different representation of the data.
An often cited application of clustering is customer segmentation, though I’d say data exploration or feature extraction are more common.
–
Evaluation and parameter tuning
Quantitative measures of limited use
Usually qualitative measures used
Best: downstream tasks
What is your goal?
Clustering Algorithms¶
So now let’s start discussing some of the standard algorithms.
K-Means¶
One of the most basic and most well-known ones is kmeans. Here k stands for the number of clusters you’re trying to find.
Objective function for K-Means¶
\(\mathbf{c}_{x_i}\) is the cluster center \(c_j\) closest to \(x_i\)
Finds a local minimum of minimizing squared distances (exact solution is NP hard):
New data points can be assigned cluster membership based on existing clusters.
Here is what this algorithm optimizes, the objective function.
It’s the sum of the distances of the cluster centers to all the points in the clusters.
So the clusters centers are c_j and we want to find cluster centers such that the sum of the distance of each point to its closest cluster center is minimized.
This is an NP hard problem, so we can’t really hope to solve it exactly, but we can run the k-means algorithm that we’ll discussed, and it will provide us with some local minimum of this objective.
K-Means algorithm (Lloyd’s)¶
.wide-left-column[
.center[
 ]
]
]
]
.narrow-right-column[ .smaller[
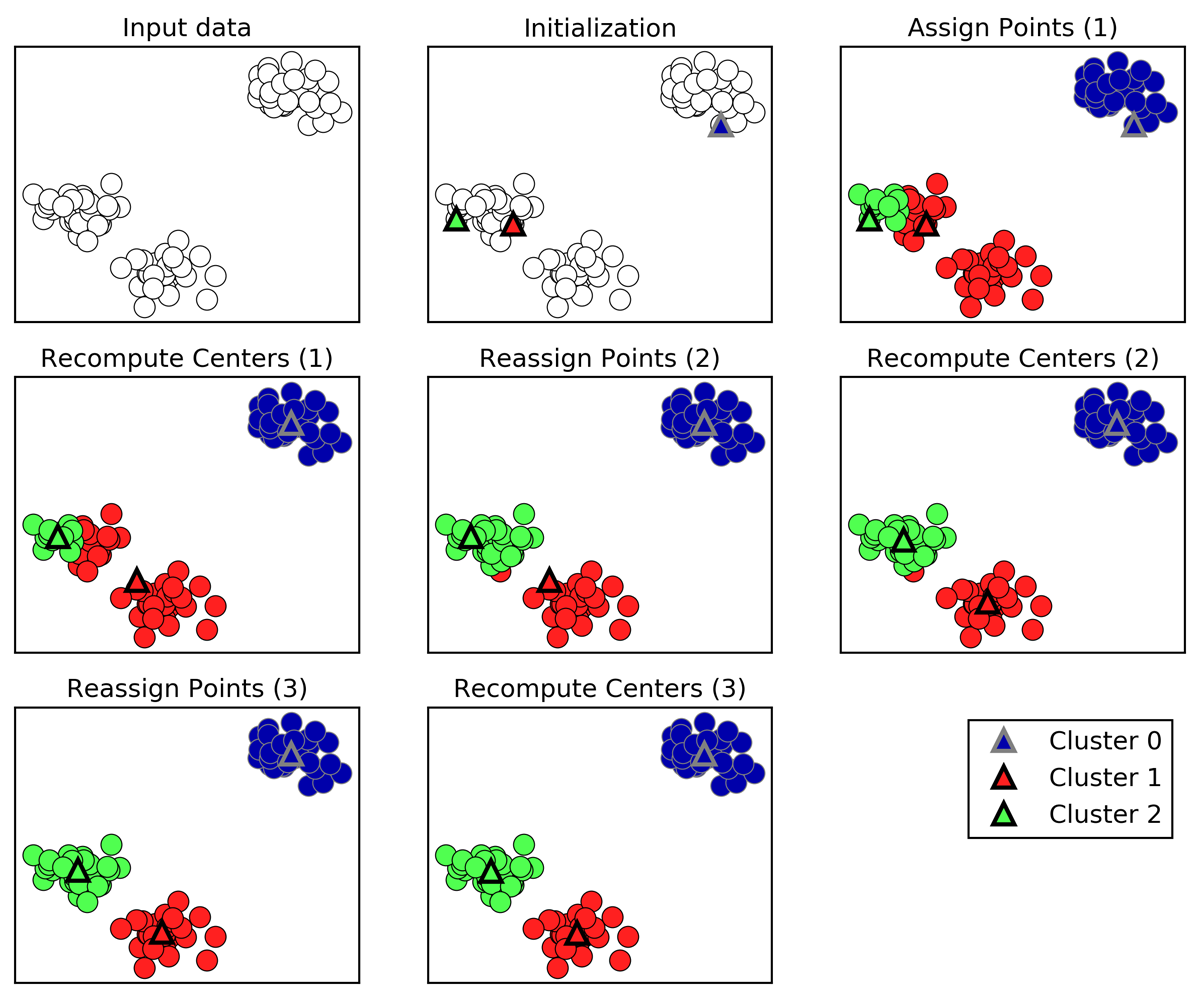
Pick number of clusters k.
Pick k random points as “cluster center”
While cluster centers change:
Assign each data point to it’s closest cluster center
Recompute cluster centers as the mean of the assigned points. ] ]
The algorithm proceeds like this: you pick the number of clusters k, then you randomly pick k data points from the data, and declare those as cluster centers. Then, you label each data point according to which cluster center it is closest to. Finally, you recompute the cluster centers as the means of the clusters, and you iterate. The algorithm always converges, which is when the assignment of the points to the clusters doesn’t change any more. Often you might want to not wait until full convergence, but just stop if the cluster centers don’t move much between iterations.
So you can see the green cluster center moving towards the red here until it has captured all the points in this group. Questions? Who has seen this before?
There’s a couple of nice things about this algorithm;
It’s very easy to write down and understand. Each cluster is represented by a center, which makes things simple, and you can reassign any new point you observe to a cluster by just computing the distances to all the cluster centers.
So in this case, if we build a model on some data that we collected, we can easily apply this clustering to new data points. That’s not the case for all clustering algorithms.
K-Means API¶
.narrow-right-column[
.center[
 ]
]
]
]
.wide-left-column[ .smaller[
X, y = make_blobs(centers=4, random_state=1)
km = KMeans(n_clusters=5, random_state=0)
km.fit(X)
print(km.cluster_centers_.shape)
print(km.labels_.shape)
(5, 2)
(100,)
## predict is the same as labels_ on training data
## but can be applied to new data
print(km.predict(X).shape)
(100,)
plt.scatter(X[:, 0], X[:, 1], c=km.labels_)
] ]
In scikit-learn, I’ve made some random data points. I instantiated a KMeans object, passing the number of clusters I want and for reproducibility I set the random state to 0, I implemented fit, and then I inspected some of attributes. So the shape of cluster centers is 5 and 2. Meaning there’s 5 cluster centers in 2-dimensions. The labels are the cluster indices assigned to the data. So there’s 100 data points and each of them is assigned an integer from zero to four.
KMeans also has a predict method. The predict method computes the cluster labels according to this clustering. So this is a nice property of KMeans that you can assign cluster labels to new data points, via this predict methods.
If you call predict method on the training dataset, you get the same thing back that is in labels, which is just a training data labels. But you can also pass in any new data that you observe, and it will assign one of the clusters based on which cluster centers are closest.
Q: Why is the centers in two dimensions?
Because the input spaces is in two dimensions in this toy dataset.
Cluster centers live in the same space as the data.
Restriction of Cluster Shapes¶
.left-column[
 ]
.right-column[
]
.right-column[
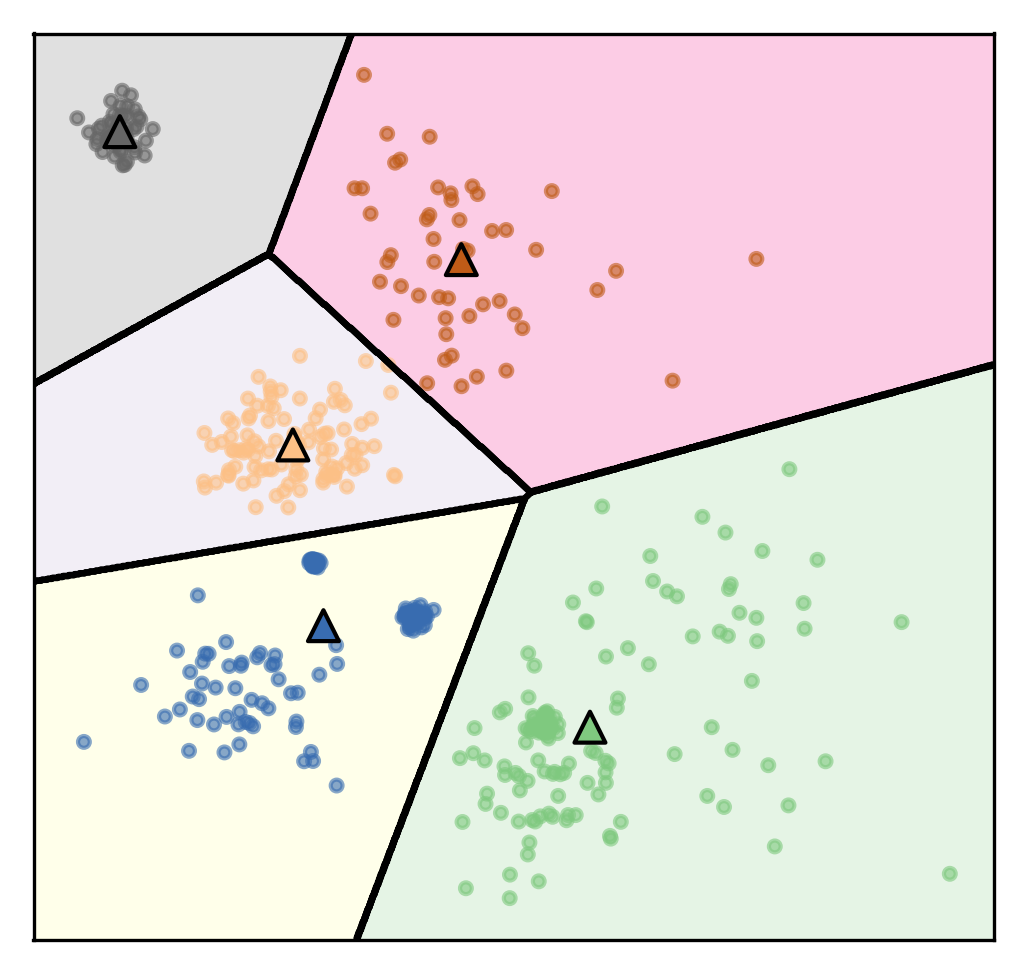 ]
.reset-column[
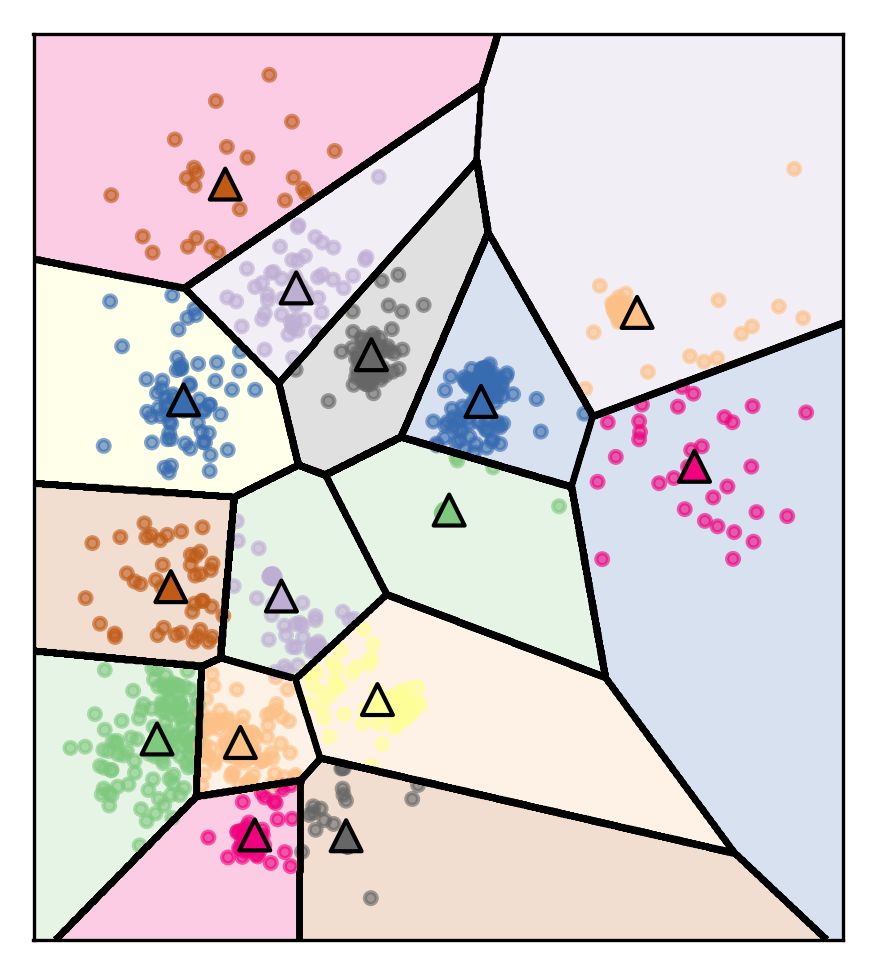
Clusters are Voronoi-diagrams of centers
]
]
.reset-column[
Clusters are Voronoi-diagrams of centers
]
I want to talk about some of the properties and limitations of KMeans.
So the cluster shapes, I restricted them in KMeans because they’re Voronoi-diagram of the centers.
Voronoi-diagrams basically just mean these cells… while the boundary between two neighboring clusters is just the center of the two centers. So given these centers completely define a clustering and so you compute this distance boundaries. The whole clustering is specified just by the cluster centers, but that really restricts the shape. So all of these cells will be convex sets, so you can’t have like a banana shape or something like that. That’s one of the limitations.
Clusters are always convex in space
Limitations of K-Means¶
.center[
 ]
]
Cluster boundaries equidistant to centers
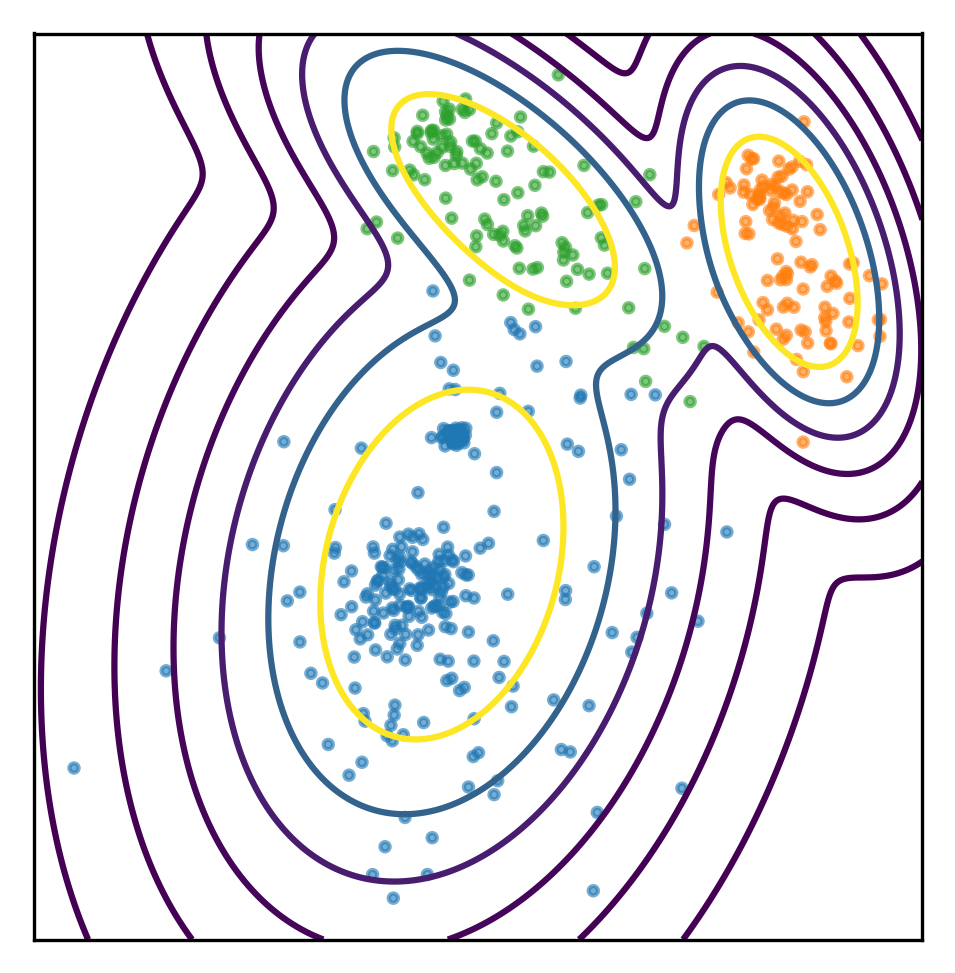
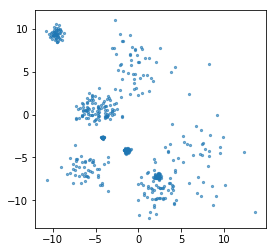
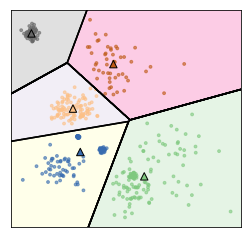
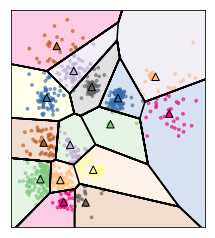
You can also not really model the size of centers very well. So here, I have three clusters and this is the result of KMeans on this dataset that I created from three Gaussians. So the Gaussians I used to create this data set was one big blob in the center and one smaller ones in bottom left corner and top right corner.
But KMeans wasn’t really able to pick up on these three clusters because the boundary between the clusters is the middle between the cluster centers.
Limitations of K-Means¶
.center[
 ]
]
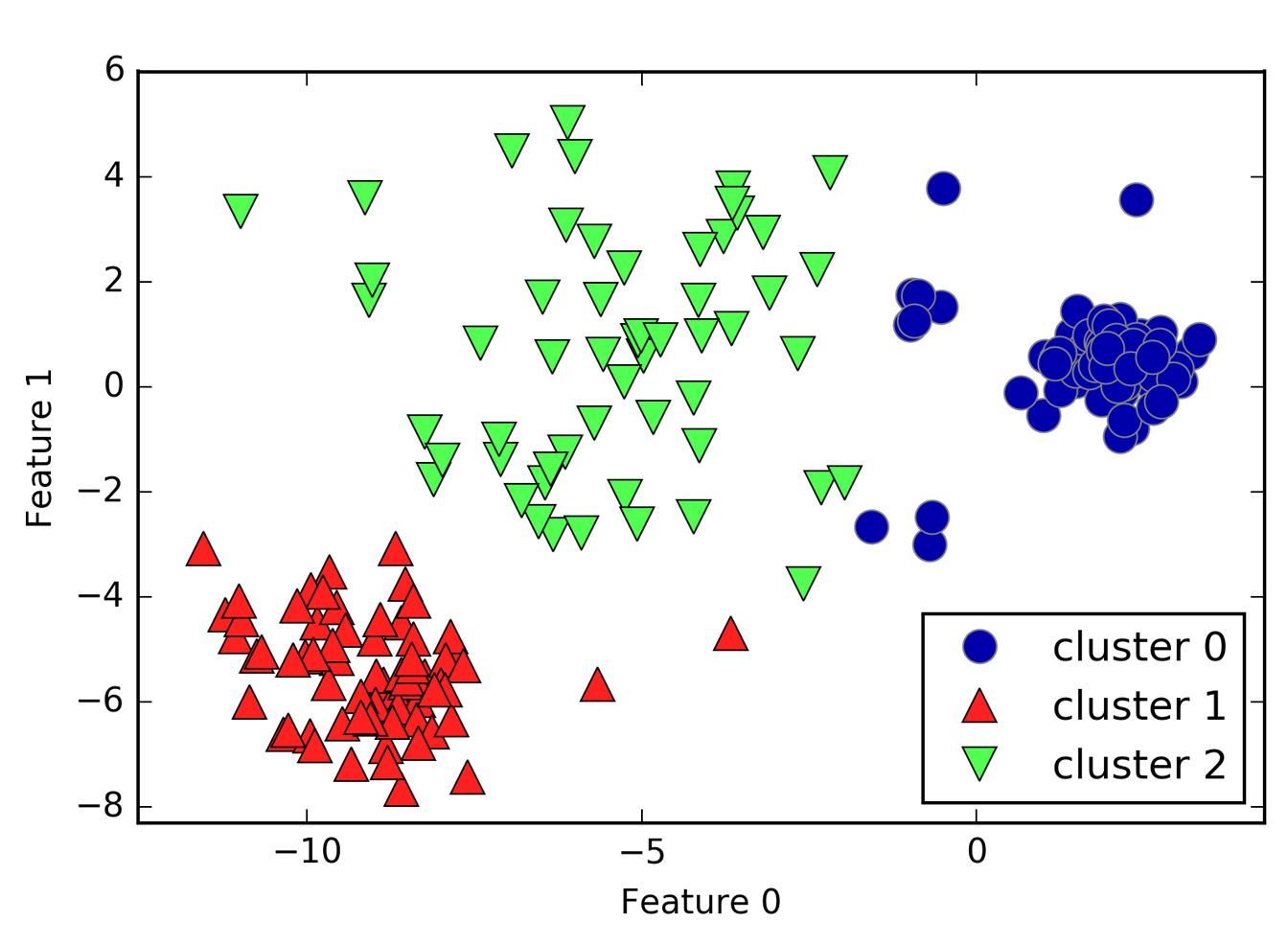
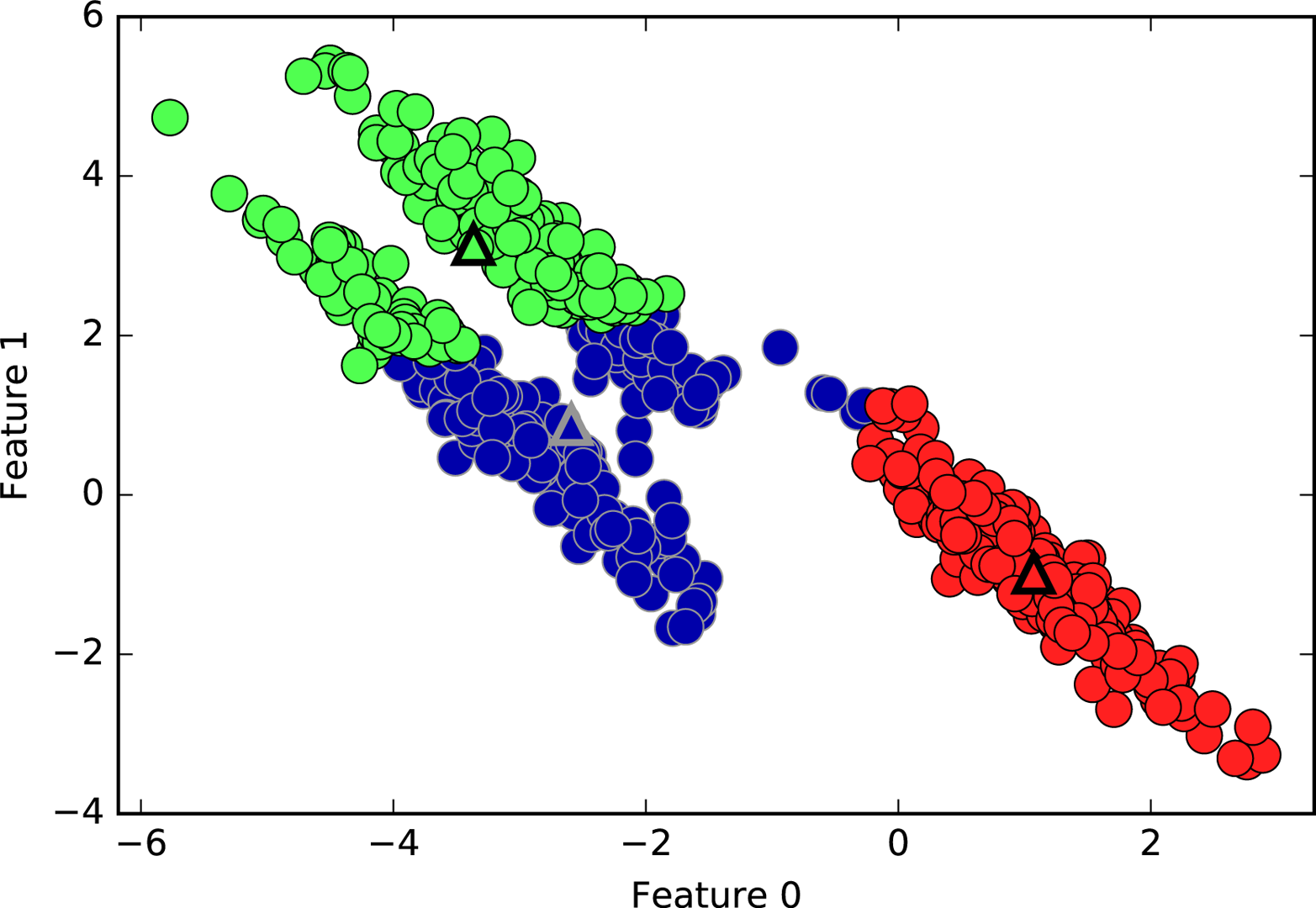
Can’t model covariances well
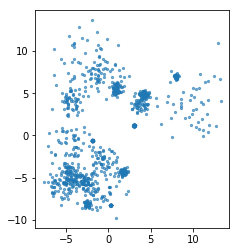
It’s also not able to capture covariance. So here, for example, there’s three groups in this dataset, and KMeans doesn’t really pick up on these shapes.
Limitations of K-Means¶
.center[
 ]
]
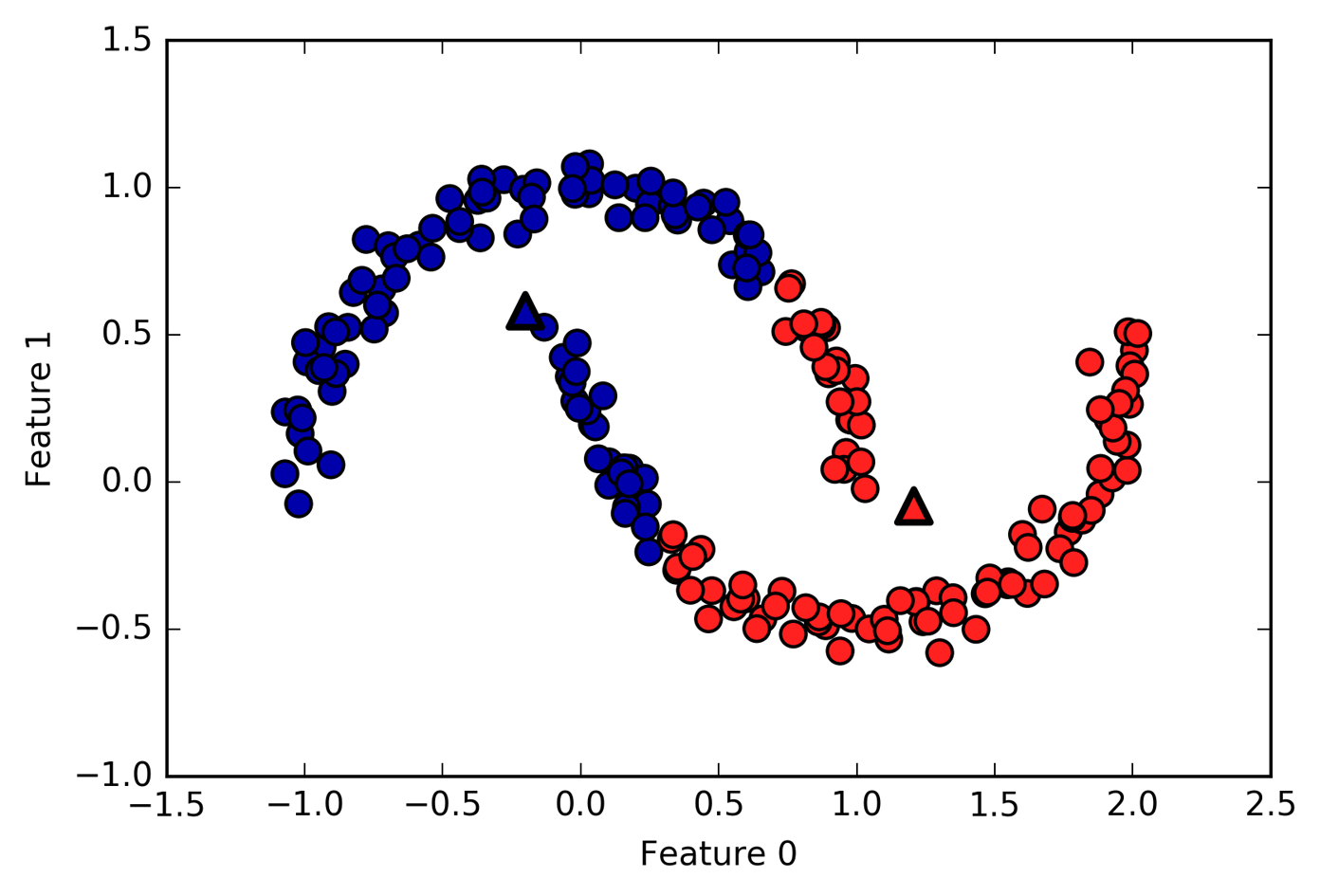
Only simple cluster shapes
Since you have only simple cluster shapes, so if I use this two cluster dataset, this will be what KMeans gives me because basically it cannot do anything else but straight lines for two clusters.
Even though it has these restrictions it’s still a very commonly used algorithm. And so we’ll talk a little bit more about some of the other properties of this algorithm.
Computational Properties¶
Naive implementation (Lloyd’s):
n_cluster * n_samples distance calculations per iteration
The naïve implementation is what I basically talked about, in each iteration it requires you to compute the distance from all data points to all the cluster centers. So you have to do number of clusters times number of samples, many distance calculation per iteration. That’s actually if you have many clusters or if you have many features or if you have many samples that can take like a whole bunch of time.
–
Fast “exact” algorithms:
Elkan’s, Ying-Yang, …
There’s also fast exact algorithms. One of them is implemented in scikit-learn called Elkan’s. Another algorithm is Ying-Yang, which is maybe five years old. There are newer algorithms being developed that uses the triangle inequality to not re-compute all the distances. So basically, in these algorithms you compute the distances between the clusters and if one cluster is far enough from another cluster, the data point that was assigned to the first cluster will not be assigned to the second cluster since the distance between clusters is so big. And so you can use the triangle inequality to save lot of these distance calculations.
–
Approximate algorithms:
minibatch K-Means
And finally, there’s a bunch of approximate algorithms, particularly, minibatch KMeans. It’s much much faster than KMeans, but it’s an approximation.
So here’s, saying exact algorithm means exact in the sense, that they are exactly the same as what Lloyd wrote down in the 50s, but not exact as they don’t actually solve the problem. Solving the optimization problem exactly is impossible. So it’s not really clear if it’s very important how exactly this is as you always just have an approximation so it might be a good idea to give up on trying to do exactly the thing that Lloyd did and something like minibatch KMeans, which can be much, much faster.
Q: Do we do feature engineering?
Yes, since this is distance space, scaling is clearly important. But the problem is, you can’t really evaluate well how good your clustering is. And so it’s not very easy to prototype anything at all. So you can try to engineer features around the clustering again, but then you need to compare the old and the new clustering. And basically, you need to look into the data and see does the new clustering make more sense than the old one.
Initialization¶
Random centers fast.
K-means++ (default): Greedily add “furthest way” point
By default K-means in sklearn does 10 random restarts with different initializations.
K-means++ initialization may take much longer than clustering.
What I said before is basically compute random centers, that’s very fast. But it’s also not very great, there’s a strategy that’s the default in scikit-learn that is very commonly used is called K-means++.
It picks a point randomly, and then adds the most furthest away point in the data to it. And then it adds the most further away point to both of these two points, and so on. So it always pick the further away point.
I think there’s some randomization there. But the idea is for the initial cluster center to be far away as possible and that might give you better optima, and it might speed up the optimization.
The problem with this is that if you do this, like greedily adding the furthest away point, you need to compute a lot of distances. And if you have many clusters and many data points it becomes very expensive.
And in particular, if you’re using Minibatch KMeans, I’ve seen that running this initialization scheme becomes actually much more expensive than running clustering. And that’s kind of silly. So if you run KMeans on bigger data sets you should be aware of how much time does the initialization take and how much time does your clustering take and maybe do a super initialization if it takes too long.
One thing you should be aware of is that by default, scikit-learn does 10 years random restarts for KMeans. So basically, it does this KMeans++ strategy 10 times, runs the full algorithm until convergence and then retains the results that is the best according to the criteria.
So if you have a big data set, you might not want to do that. And you might just set init to one and just run it once.
FIXME slide for kmeans++, computational cost of kmeans++
Consider using random, in particular for MiniBatchKMeans
Feature Extraction using K-Means¶
Cluster membership → categorical feature
Cluster distanced → continuous feature
Examples:
Partitioning low-dimensional space (similar to using basis functions)
Extracting features from high-dimensional spaces, for image patches, see http://ai.stanford.edu/~acoates/papers/coatesleeng_aistats_2011.pdf
I think one of the most useful ways to use KMeans is to extract new nonlinear features. You can either add categorical features saying it belongs to this cluster or you can add continuous features saying the distance to this cluster is that. So if you call the transform method in scikit-learn, it will compute the distances to all the cluster centers. So you’ll have a new feature space that has number of clusters many dimensions, and that’s a very nonlinear transformation of original feature space. This can be helpful, sometimes. In particularly if you have very simple models.
In this paper on the C4 dataset, they ran KMeans, used the cluster centers to extract features and then ran logistic regression and it was as good as the deep learning methods at that time.
By now, deep learning is much, much better than this. But it was very interesting because it uses very simple approach to find basically prototypes in the data center, they used like hundreds or thousands of cluster centers and then use the distances to these cluster centers as the features.
Agglomerative Clustering¶
The next algorithm I want to talk about is similarly classical, it’s called agglomerative clustering.
Agglomerative Clustering¶
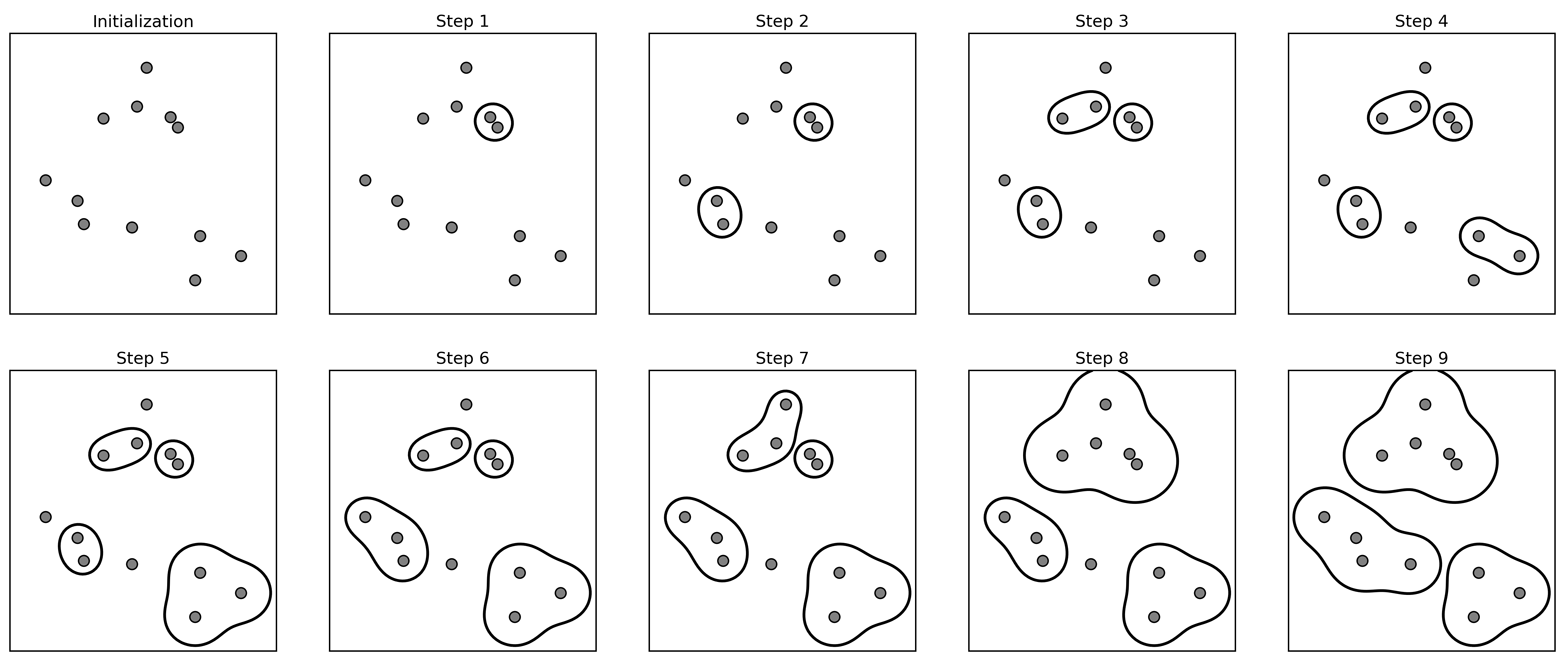
Start with all points in their own cluster.
Greedily merge the two most similar clusters.
.center[
 ]
]
In agglomerative clustering, the idea is that you start out with a bunch of points again. You assign each point its own cluster label, and then you greedily merge clusters that are similar. So here, each of the points is its own cluster, then, in step one, I’m merge the two closest points. Step two, I merged the next closest one, and so on. I can keep merging and merging until one big group is left. Here, I merged until there’s three clusters left.
Creates a hierarchical clustering from with cluster sizes from n_samples to single cluster.
Dendograms¶
.left-column[
 ]
]
.left-column[
 ]
]
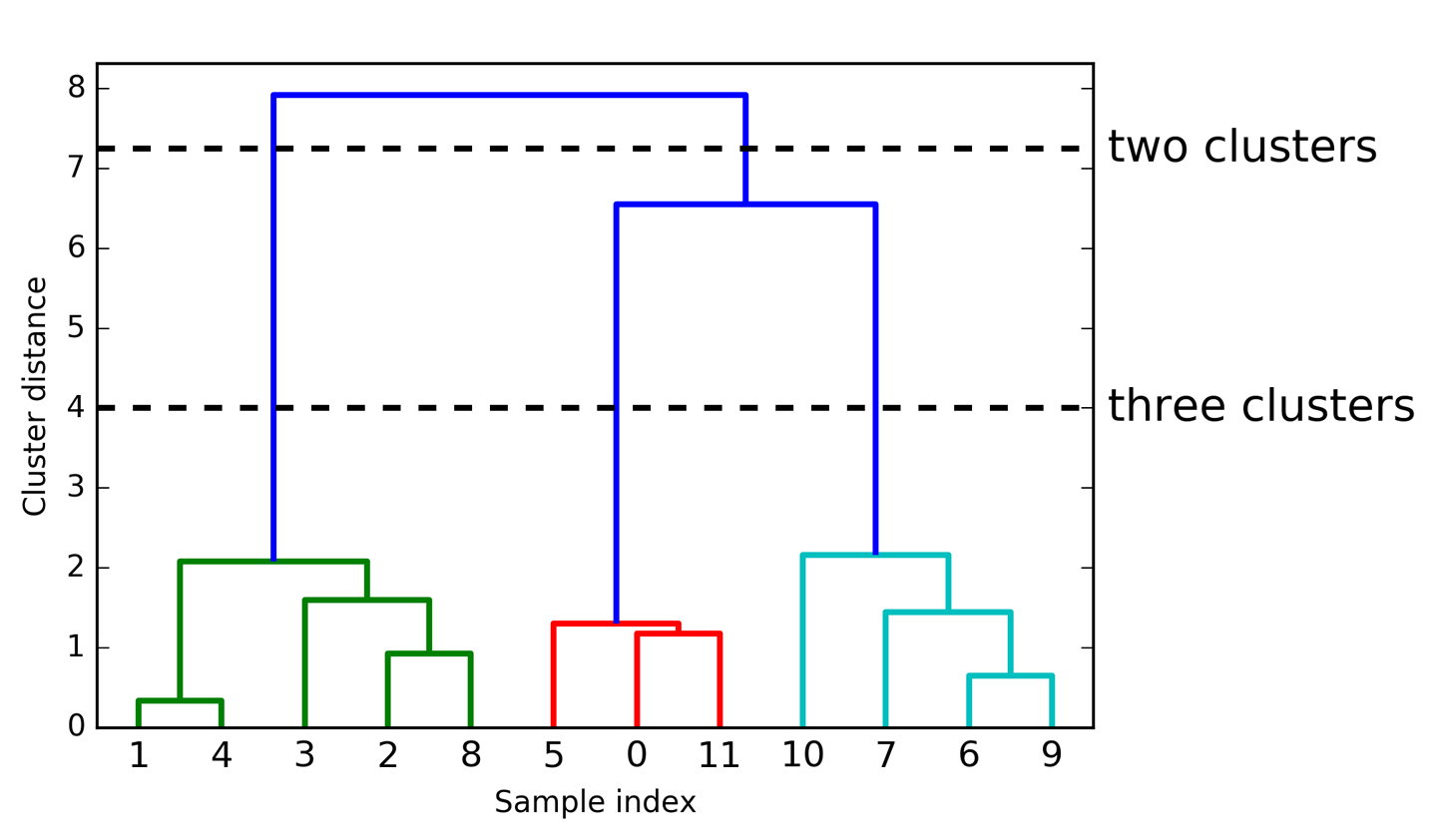
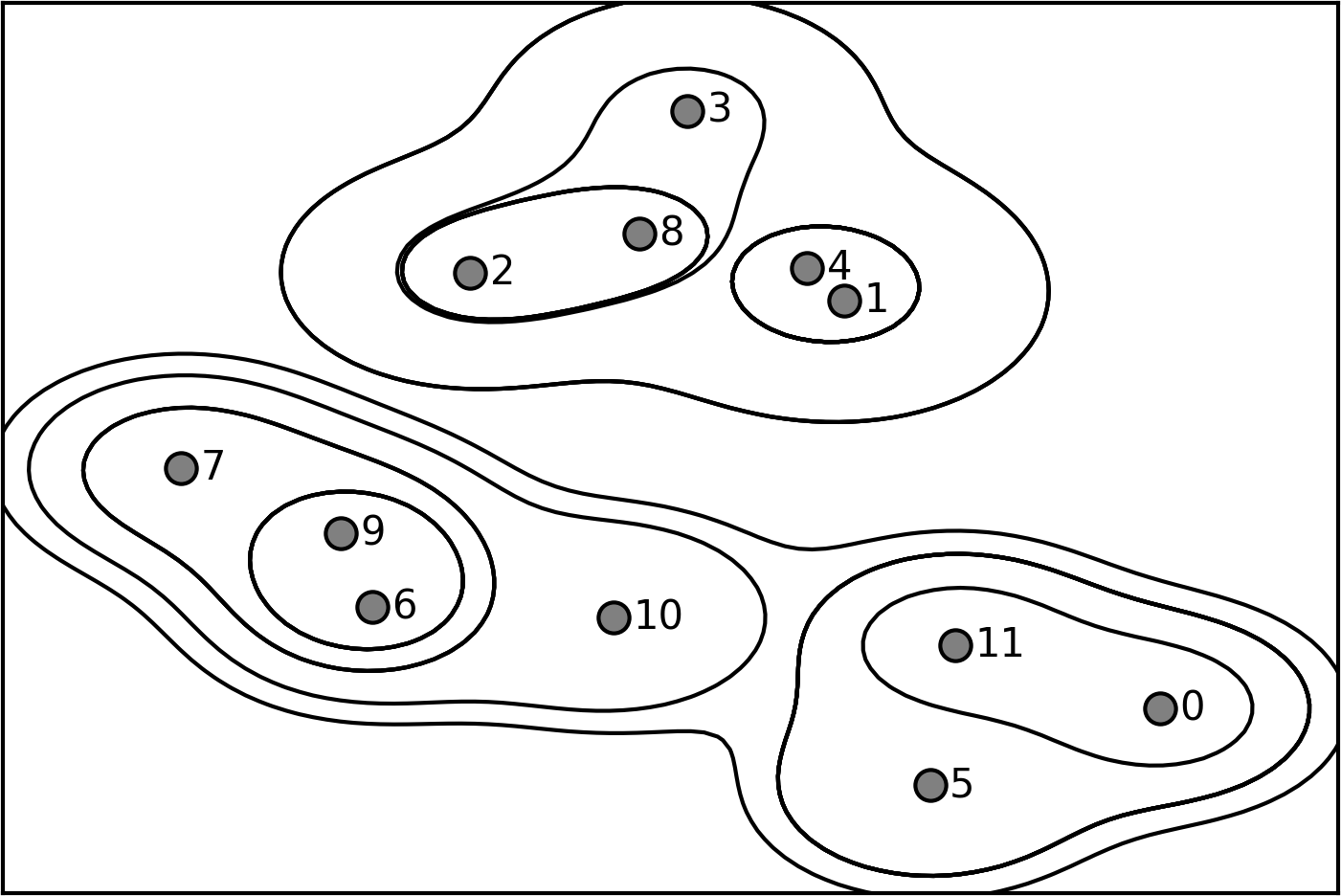
Dendogram is another visualization of agglomerative clustering. Here, given this procedure, you can visualize this as a tree. It is also called as hierarchical clustering, because it gives you a whole hierarchy of different clusters. On the lowest level of the hierarchy, each data point is its own cluster center.
So here, I have 12 data points so I would have 12 clusters. And if I merged everything, I have one cluster. But in between, there’s this whole hierarchy of different numbers of clusters. Here, you can see the one and four was merged first, then six and nine was merged, then two and eight was merged, then zero and eleven, then five and zero and eleven and so on.
The length of these bars are basically the distance between the clusters that got merged. So you can see the distance between zero and eleven, and zero, eleven, and five are very small. So that basically means that all three of them have almost the same distance. Whereas here, you can see one and four are much closer together than one and four and three and two.
By looking at this dendogram, it’s very helpful for picking the number of clusters. So if I look at this, I would probably say, three is the right number of clusters.
So for agglomerative clustering, you can either pick the number of clusters or you can basically pick a threshold on the merging criteria. So basically, if the clusters are too far away, you stop merging. But you need to specify one of these two things, either number of clusters, or when should you stop merging. But for both, looking at Dendogram is quite useful.
Agglomerative clustering is in scikit learn while Dendogram are not available. But Dendogram can be computed in scipy (code available in the GitHub repository)
Dendograms are mostly helpful if you don’t have many data points. If you have millions of data points, then this tree will not be very easy to look at.
This is a bottom-up approach where you start merging things from the bottom. You can also start by splitting the data or compute in a top-down manner as well. Some of these are equivalent and it depends on how you do similarity. Some of the bottom up and top down approach lead to the same result. And it depends mostly on how you’re define the similarities.
Done with scipy! FIXME dendrogram code!
Linkage Criteria¶
.center[
 ]
]
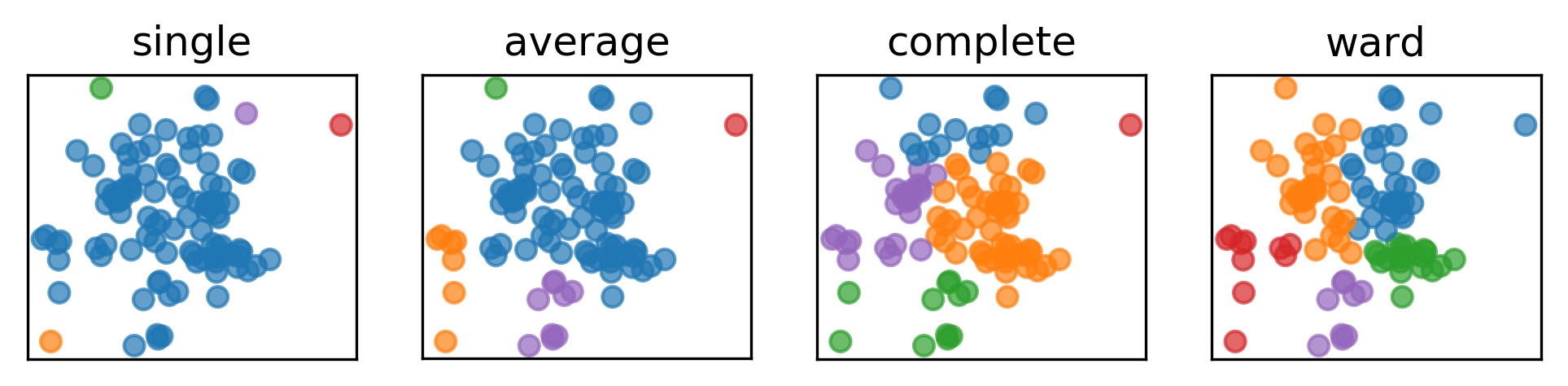
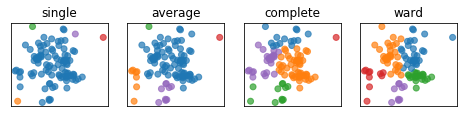
.narrow-left-column[ .smaller[ Cluster sizes:
single : [96 1 1 1 1]
average : [82 9 7 1 1]
complete : [50 24 14 11 1]
ward : [31 30 20 10 9]
]]
.wide-right-column[ .smallest[
Single Linkage
Smallest minimum distance
Average Linkage
Smallest average distance between all pairs in the clusters
Complete Linkage
Smallest maximum distance
Ward (default in sklearn)
Smallest increase in within-cluster variance
Leads to more equally sized clusters.
]]
Here’s an example on some synthetic 2D data set. So here, I run three different clustering algorithms. You can see that here in average to data point being their own cluster where as in ward the cluster size are much more similar.
In particular, average, complete and single linkage tend to cut off single points that are very far away. So if one point is far right from everything, every linkage criteria except ward will get their own cluster.
There’s four commonly used similarities. Complete linkage looks at the smallest maximum distance. So if you look between two clusters, you look at the maximum distance between points in these two clusters.
Average linkage looks at the average distance of points between clusters.
Single linkage looks at the minimum distance between clusters.
Ward looks at smallest increase within cluster variance. You merge the clusters and you look how much did the variance increase.
Single linkage is the same as computing a minimum spanning tree, and then cutting the longest edge. So that’s actually equivalent to top down approach.
Ward is the default in scikit-learn. It’s kind of nice because it makes relatively equally sized clusters.
single linkage = cutting longest edge in minimum spanning tree.
Pros and Cons¶
Can restrict to input “topology” graph. –
Fast with sparse connectivity, otherwise O(log(n) n ** 2 )
–
Some linkage criteria an lead to very imbalanced cluster sizes
–
Hierarchical clustering gives more holistic view than single clustering.
One thing that’s nice about them is you can restrict them to some input topology of the input space. So you can look at only merge things that are neighboring. You can do neighboring the input space by using the KNearest neighbor graph or you can do input like in an image space. So for example, you could say looking at pixels in an image, I only want to merge pixels that are ease in the image.
You have some idea of the structure of the data then this allows you to really speed up the algorithm because you only need to consider very few merges. If you have very high dimensional data, or a lot of data points, computing all possible distances will be very slow. But if you have a very restricted topology, this can become very fast. Some of the other people working on scikit-learn are really into this because they use that to cluster regions in the brain and they walk cells. So you have a priori topology, you know, like, which, which walks cells in the brain are next to each other and that means they can compute this very quickly. If you would use clustering algorithm that’s not aware of this neighborhood structure then it would take a long time.
If you have like a sparse connectivity structure, it’s going to be fast otherwise might not be so fast.
Most of linkage criteria except ward might lead to very imbalanced cluster sciences, that might be something you want or not, depending on your application.
If your data set is reasonably small or something like that, you can look at the Dendogram which shows you all possible clusters, basically and this gives you a more holistic view of the structure of your data and help you pick the right number of clusters or tell you if there’s the right number of clusters.
Q: Can you use clustering for generalization?
With KMeans, we could assign a new data point to one of the clusters. For agglomerative clustering, we can’t really do that.
common graph: neighborhood in input space, neighborhood in image hierachy / dendrogram can help picking number of clusters.
DBSCAN¶
The last clustering algorithm I want to talk about is DBSCAN. This was developed in the 2000s. It’s little bit more complicated, but it’s actually quite useful in practice.
Algorithm¶
.left-column[
 ]
.right-column[
]
.right-column[
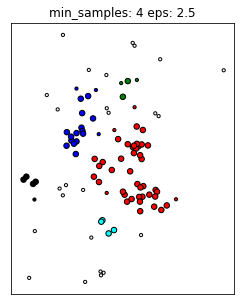
eps: neighborhood radius
min_samples: 4
A: Core
B, C: not core
N: noise
]
It’s also an iterative algorithm. This algorithm has two parameters, one is the neighborhood radius called epsilon and the other is the minimum number of samples in a cluster.
So here in this example, the colored points are data points, and we’ve drawn the radius epsilon around it. That said the minimum number of samples is four. So this means each cluster is restricted to have a minimum of four samples to be a cluster.
So given these parameters, we can define the notion of a core sample. Core sample in DBSCAN is a sample that has more than min_sample minus one other samples in its epsilon neighborhood.
The way this algorithm works is, it picks a point at random. Let’s say, we pick point A at random, then it looks whether this is a core point or not, by looking at the number of neighbors with an epsilon, you see three neighbors here with an epsilon and hence it’s a core point and so that means I give it a new cluster label, in this case, it’s red. Then I add all of these neighbors to a queue and then I process them all in turn. So I go to this red point, check is it a core sample and not a core sample and again, it has four neighbors, so it’s a core point. And I added all the neighbors to the queue. And so you keep doing that.
Here, once you reach point B, every point that you’re going to reach within an epsilon neighborhood of the cluster will get the same cluster label as A. So if you reach this point, you will see the epsilon neighborhood, this point B wasn’t visited yet and you will assign that the same cluster label. But B itself is not a core point and so you stop iterating there. Same goes for C.
So once your queue is empty, meaning you went through all of these points, all the core points that you could reach, then you pick the next point. If you pick a point like this N, this is not a core point. And so if you visit it, it has no enough samples in the neighborhood, you label it as noise. One kind of interesting thing about this, we label it as noise for now, basically, if at the very first point I pick B, I would have labeled B as noise in the beginning, since B is not a core point so it will not get its own cluster. So I would label B as noise. But then later on, when I label the red cluster, I see I can reach B from the red cluster, I’ll give it that cluster label.
If there was an unexplored neighbor here, we would not visit it because only core points basically add points to the queue. So if there was two unexplored neighbors, it would be a core point, if there’s only one, it’s not a core point because it doesn’t have enough neighbors. So basically, the cluster doesn’t promote in that direction.
One thing that’s nice about this is you identify noise points. The other clustering algorithm didn’t have a concept of noise points. In DBSCAN, all points are assigned to cluster or they’re labeled noise, depending on what you want to have on your clustering algorithm that might be good or bad.
Clusters are formed by “core samples”
Sample is “core sample” if more than min_samples is within epsilon - “dense region”
Start with a core sample
Recursively walk neighbors that are core-samples and add to cluster.
Also add samples within epsilon that are not core samples (but don’t recurse)
If can’t reach any more points, pick another core sample, start new cluster.
If newly picked point has not enough neighbors, label outlier
Outliers can later be relabeled to belong to a cluster. ]
by David Sheehan dashee87.github.io
This is from a blog post that shows you how DBSCAN works iteratively with two different settings. So basically, here in the left, epsilon is 1 and min points is 8 while on the right, epsilon is 0.6, and min points is 6.
From the chart in the left, first we pick some in the blue thing and we cover all of the blue cluster, and then something in the green cluster and then the red and yellow. And the rest all are just labeled noise because they don’t have eight neighbors.
In the case on the right, some of them have six neighbors and so they’re labeled as their own clusters. You can see here, in between they’re randomly picked. So once we picked these random points, they’re labeled noise.
So there’s no easy way to pick a direct upper bound on a number of clusters, but you can run it for different volumes of epsilon, and pick the one that has the right number of clusters for you. So you can define that at priori.
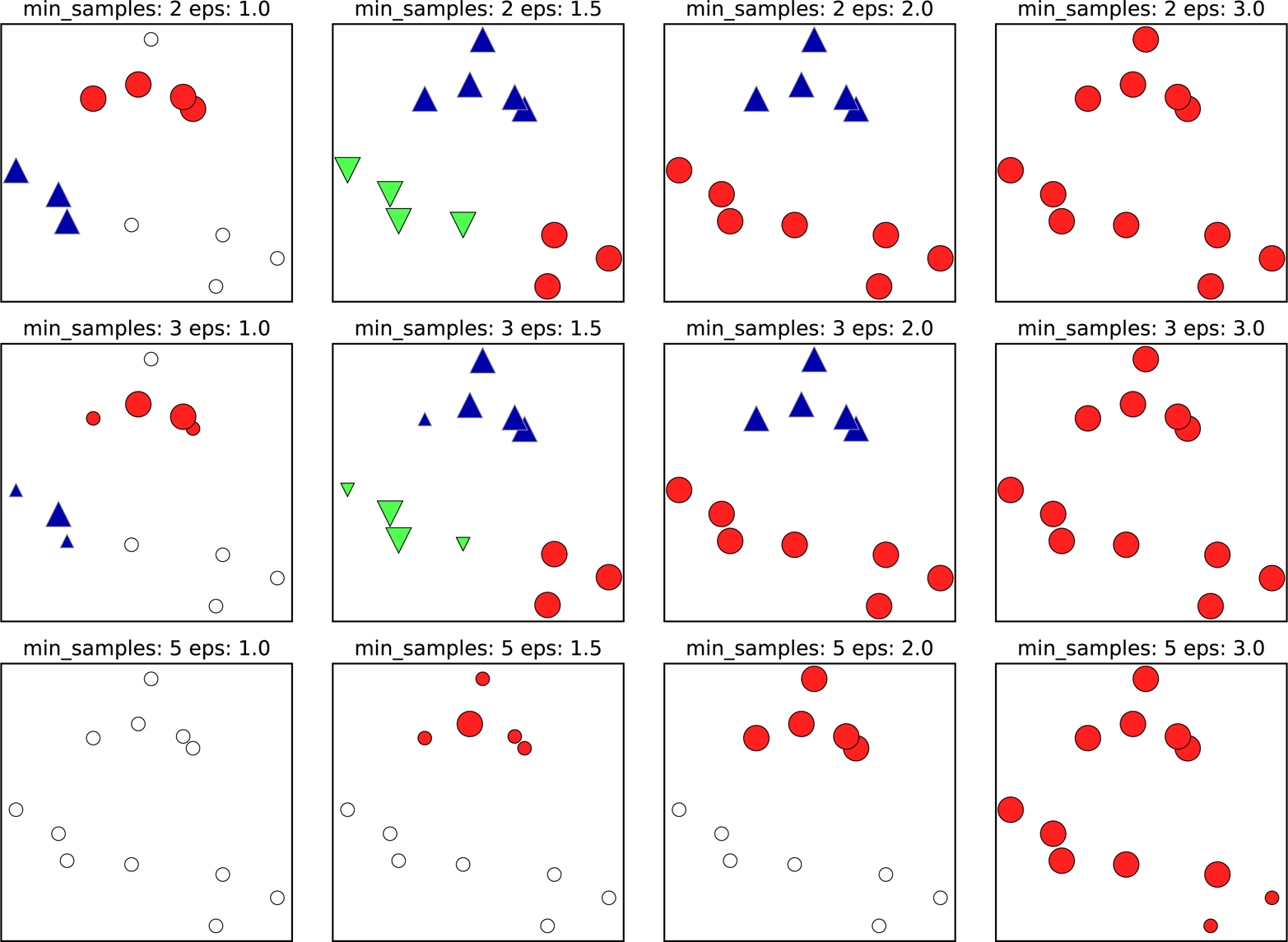
Illustration of Parameters¶
.center[
 ]
]
In this illustration, all the big points are core points, all the small ones are not core points, and all the white ones are noise. And so basically, if you decrease min samples, the thing you do is all points that are smaller than this becomes noise. So here, in the first row, one cluster has four points, and the other cluster had three points. So if I do min samples equal to three, they’re both clusters. So I do min samples to five, none of them are clusters, they’re labeled noise.
If you increase epsilon, you make more points neighbors. And so basically, you’re merging more and more clusters together. Increasing epsilon creates fewer clusters, but they’re bigger. So you can see from in the second row, with epsilon 1.5 you get three clusters, with epsilon equal two you get two clusters, with epsilon three, you get just one cluster.
FIXME add epsilon circles to points?
Pros and Cons¶
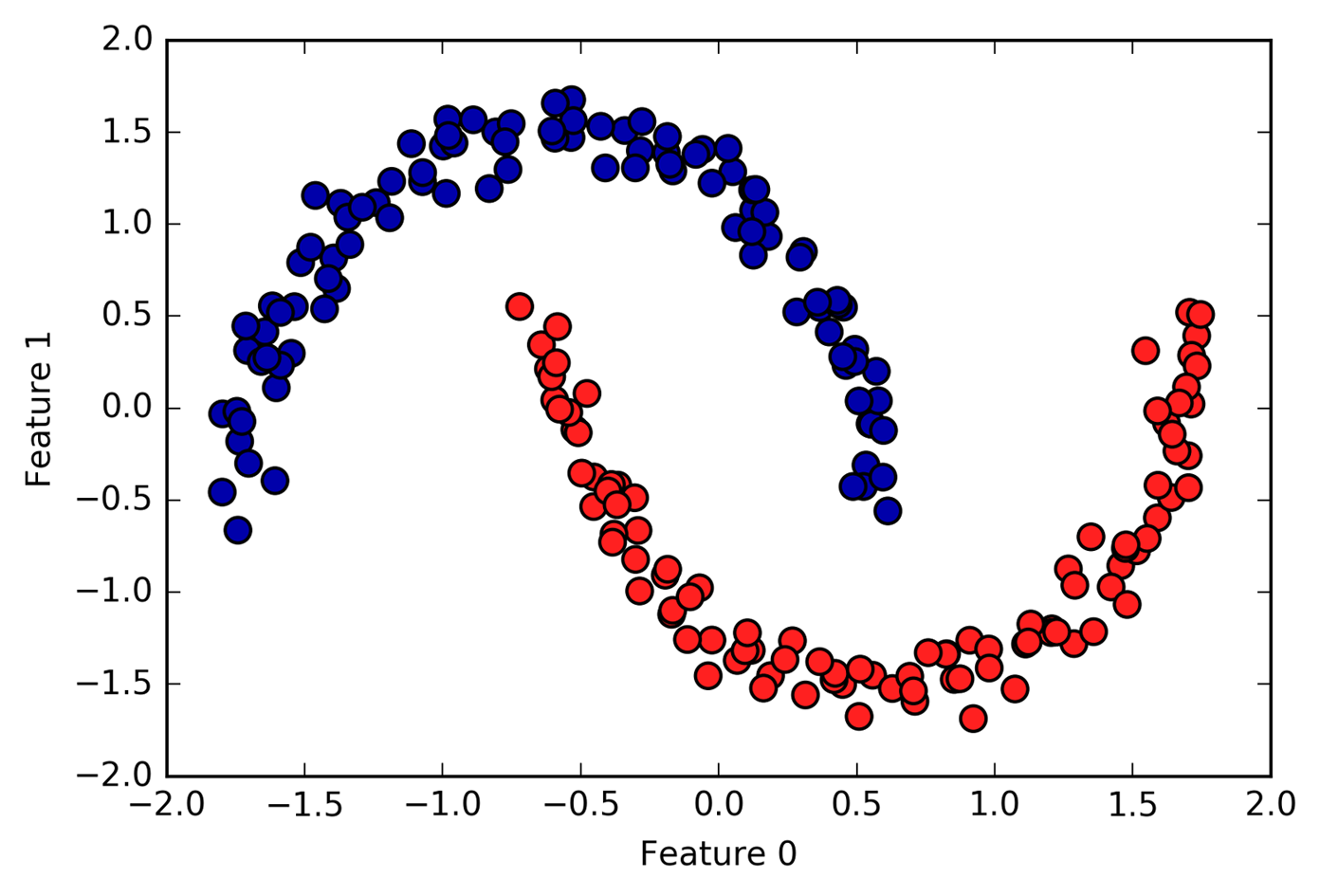
Pro: Can learn arbitrary cluster shapes
Pro: Can detect outliers
Con: Needs two (non-obvious?) parameters to adjust
Improved version: HDBSCAN
.center[
 ]
]
What’s nice about this is that it can learn arbitrary cluster shapes. Even with agglomerative clustering, even if you don’t add, like some neighborhood graph topology on it, agglomerative clustering would not be able to learn this. DBSCAN has no problem with learning this since it only works very locally.
Also, DBSCAN can detect outliers, which is kind of nice. What’s slightly less nice, but you need to adjust two parameters and parameters are not directly related to the number of clusters.
So it’s not entirely clear to me, whether it is harder to pick epsilon, or is it harder to pick number of clusters but sometimes if an application asks for 10 clusters, that’s little bit harder so you need to rerun the algorithm with multiple values of epsilon to figure out what epsilon should it be to get you to 10 clusters.
This algorithm is pretty fast, because it only uses local search. And it can find arbitrary cluster sizes. So that’s pretty nice.
Sometimes it can also give you very differently sized clusters, similar to the agglomerative metrics. Often, I find that I get like one big cluster and a couple of small clusters, which is not usually what you want. If you want various similar sized clusters, KMeans or ward is better.
The last algorithm I want to talk about is actually not a clustering algorithm. But it’s a probabilistic generative model.
eps is related to number of clusters, so not much worse than kmeans or agglomerative
(Gaussian) Mixture Models¶
Gaussian mixture models are very similar to KMeans, but slightly more flexible.
Mixture Models¶
Generative model: find p(X).
$$ p(\mathbf{x}) = \sum_{j=1}^k \pi_k p_k(\mathbf{x} | \theta) $$
Mixture models are unsupervised models that try to fit per metric density to your data. So you want to model like for p(X), you want to model a distribution of your data. Mixture model does this as a mixture of some based distribution.
My model for p(X) is the sum of Pk, each Pk is sum per metric distribution, and they’re weighted by πk, which is just a constant.
Assume form of data generating process
Mixture model assumption:
Data is mixture of small number of known distributions.
Each mixture component distribution can be learned “simply”
Each point comes from one particular component
We learn the component parameters and weights of components
Gaussian Mixture Models¶
So for Gaussian mixture models, each of these distribution would just be a Gaussian with a different mean and a different covariance function.
So you say, my P(X), my data distribution I want to model as a mixture of K different Gaussian and I want to find these means and I want to find these covariance and I want to know how I should weight them. So this is one way to write down the model.
Another way that I find often helpful when dealing with the generative model, so generative model is just a model that describes the data generation process. So basically, anything that gives you P(X) is called the generative model. Another way is writing down how you draw a new sample. And here, in this case of this mixture model, the way you would see sample from it is you sample from a multinomial with these weights, πk. So the πs, they all need to sum up to one, obviously so that the distribution is normalized.
So the integrals of each of the normals is one. So if you want the integral over x to be one, the πks need to some to one. So you can draw from a multinomial, basically using these πks and then you say, I draw a cluster K, so now I’m going to draw a new data point from K and I’m using the Gaussian distribution associated with the mixture component K.
And this is the way you would sample from this distribution. So you pick a component, and then you create a point in this component, you pick a component and you pick a point in this component.
The algorithm is basically the same as KMeans. So again, it’s a non-convex optimization. So usually you initialize the means with KMeans, and possibly do random restarts. And the algorithm is called Expectation Maximization (EM)
Basically what you do is in each iteration you assign each point a probability of being generated by each of the components. And then you can recompute mean and standard deviation or covariance matrix for each of the components based on the points that are assigned to it.
So it’s very similar to KMeans only you don’t do a hard assignment, so you don’t say this belongs to this component, you assign probabilities saying this point probably comes from this component, and is less likely to come from this component. And so, in addition to computing the means, you also compute the covariance matrices. These are the two big differences compared to KMeans.
And obviously, in the end, you get an estimate of the parametric form of the density.
Each component is created by a Gaussian distribution.
There is a multinomial distribution over the components
non-convex, depends on initialization
FIXME algorithm deserves a bit more explanation?
–
Non-convex optimization.
Initialized with K-means, random restarts.
Optimization (EM algorithm):
Soft-assign points to components.
Compute mean and variance of components.
Iterate
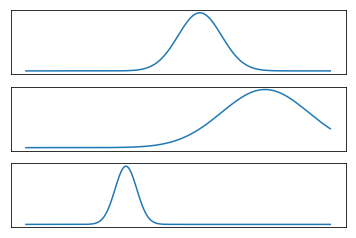
.center[
 ]
]
.center[
 ]
]
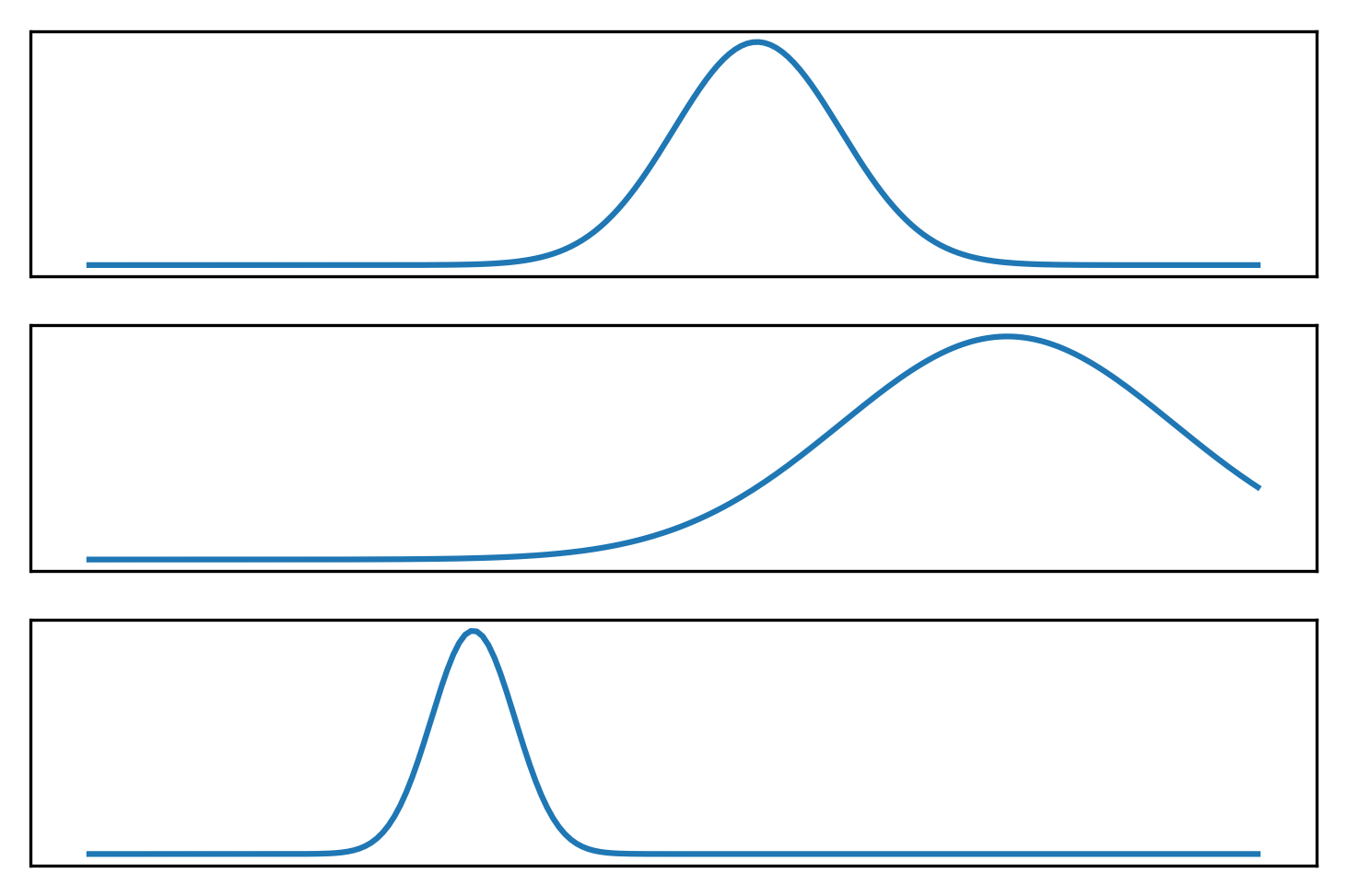
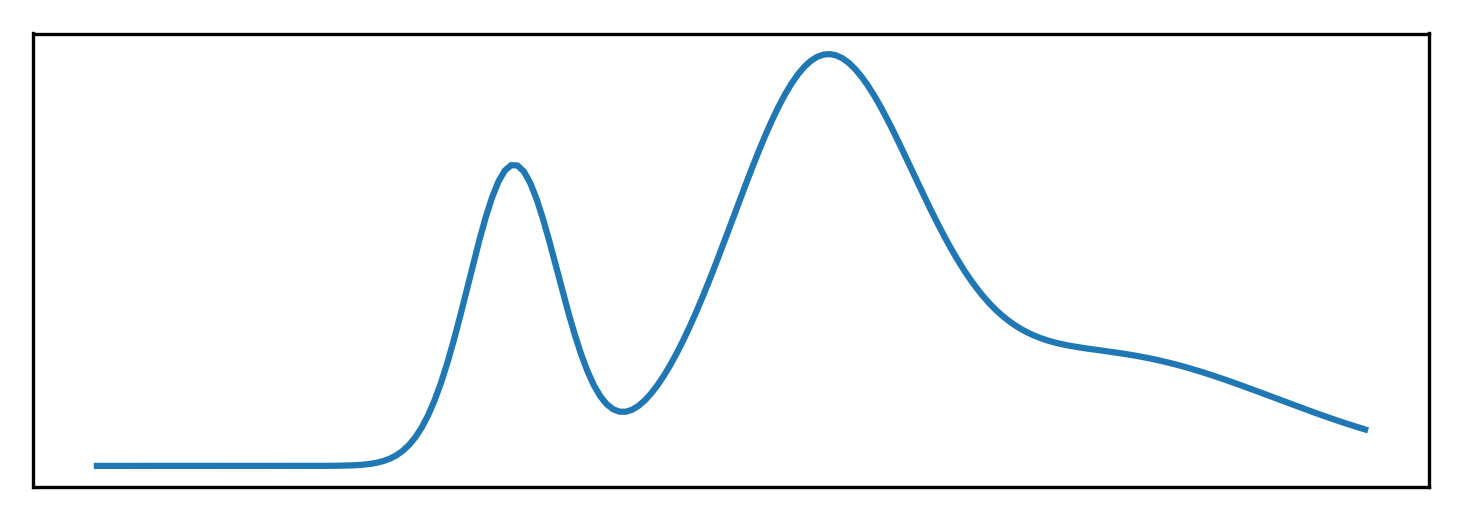
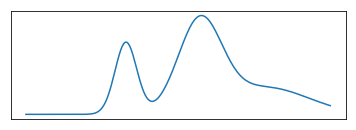
This is just sort of trying to illustrate what a mixture model might look like. So here I drew three Gaussian and the bottom one is sort of the mixture of three Gaussian. It’s kind of hard to draw distributions in 2D so I did it in 1D.
Usually you fix the number of components beforehand, KMeans and initialization and so on, and then you fit the means and the covariance
FIXME make clear bottom is weighted sum of top plots
Why Mixture Models?¶
Clustering (components are clusters)
Parametric density model
One reason might be doing clustering as we did before but as a more powerful variant of KMeans. But you can also do much more with it.
There’s a lot of things that makes having a parametric density model is a nice thing. You can say, if I see a new data point, how likely is it to observe this data point, given the model I fitted into the data, and you can use this, for example, to do outlier detection. If the point looks like it was not generated from this model that probably means it’s an outlier.
You can also use this like a base classifier where each class is more or less a mixture of Gaussians instead of just one Gaussian as we did with LDA.
There’s like many more different things where being able to compute the probability of a given data point, is often very helpful. So that’s sort of when a parametric model might be helpful.
Create parametric density model.
Allows for testing how “likely” a new point is.
Clustering (each components is one cluster).
Feature Extraction
Examples¶
.wide-left-column[ .smaller[
from sklearn.mixture import GaussianMixture
gmm = GaussianMixture(n_components=3)
gmm.fit(X)
print(gmm.means_)
print(gmm.covariances_)
[[-2.286 -4.674]
[-0.377 6.947]
[ 8.685 5.206]]
[[[ 6.651 2.066]
[ 2.066 13.759]]
[[ 5.467 -3.341]
[ -3.341 4.666]]
[[ 1.481 -1.1 ]
[ -1.1 4.191]]]
] ]
.narrow-right-column[
.center[
 ]]¶
]]¶
.narrow-right-column[
.center[
 ]
]
]
]
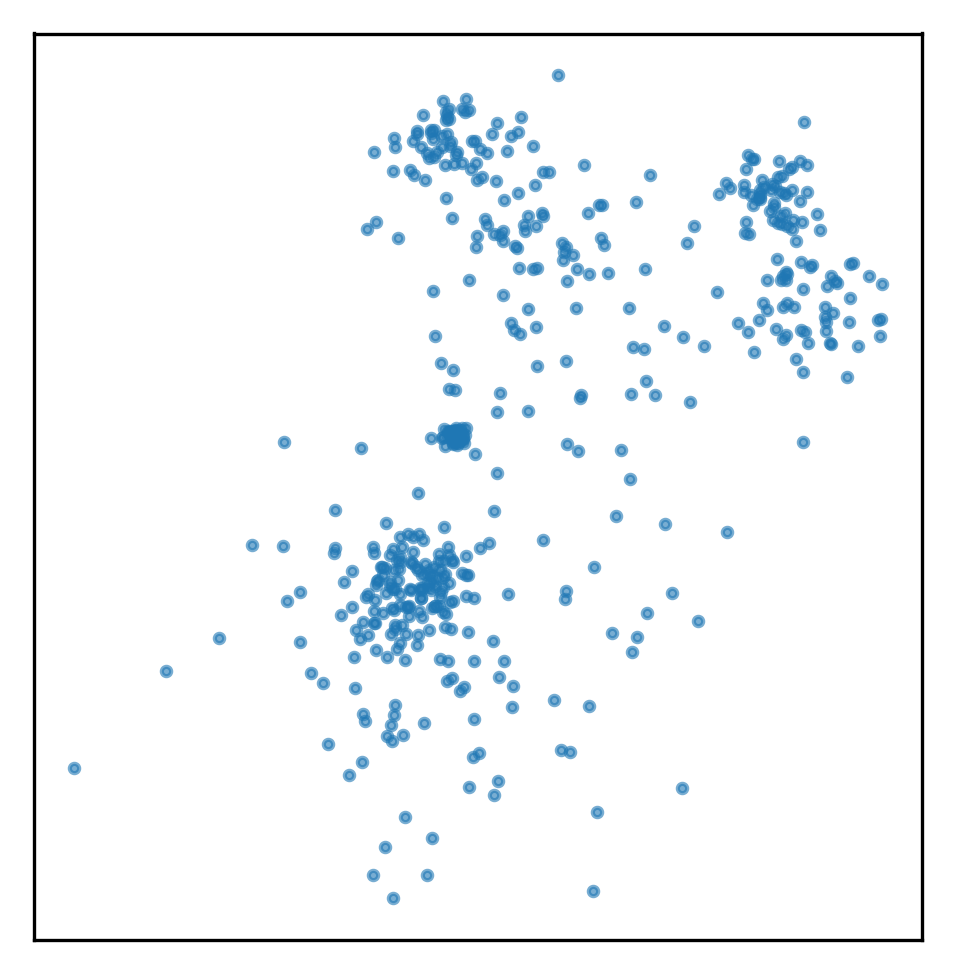
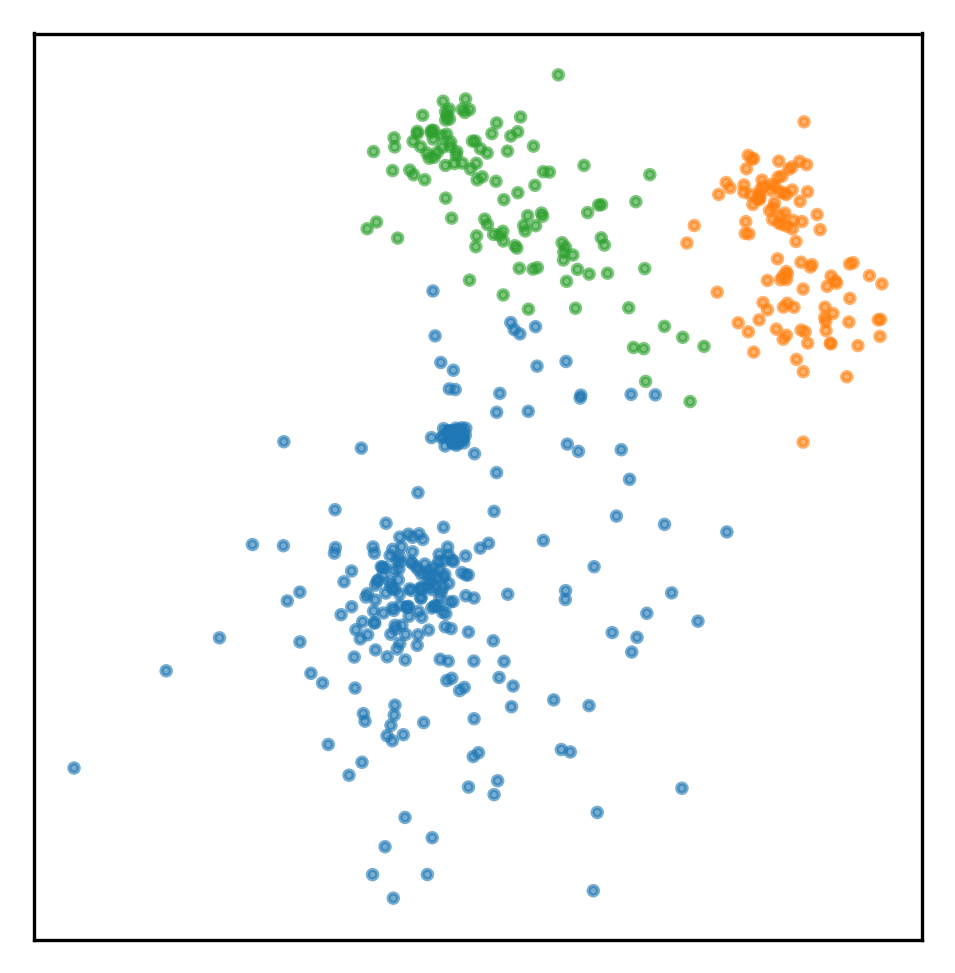
Here’s how you do this with scikit-learn. So you only need to specify the number of components, usually, you fit it on data X and you get the means and the variances.
Here, is a 2D data set, I get three components, I get three means, and I get three covariance matrices. You can see KMeans since it can model covariance, it can learn something like is the blue cluster or the blue component, more spread out than the green component which KMeans couldn’t.
Probability Estimates¶
.left-column[ .smaller[
gmm.predict_proba(X)
array([[ 1. , 0. , 0. ],
[ 0. , 0. , 1. ],
...,
[ 1. , 0. , 0. ],
[ 0.001, 0.999, 0. ]])
.center[
 ]
]
]
]
]
]
.right-column[ .smaller[
## log probability under the model
print(gmm.score(X))
print(gmm.score_samples(X).shape)
-5.508
(500,)
.center[
 ]
]
]
]
]
]
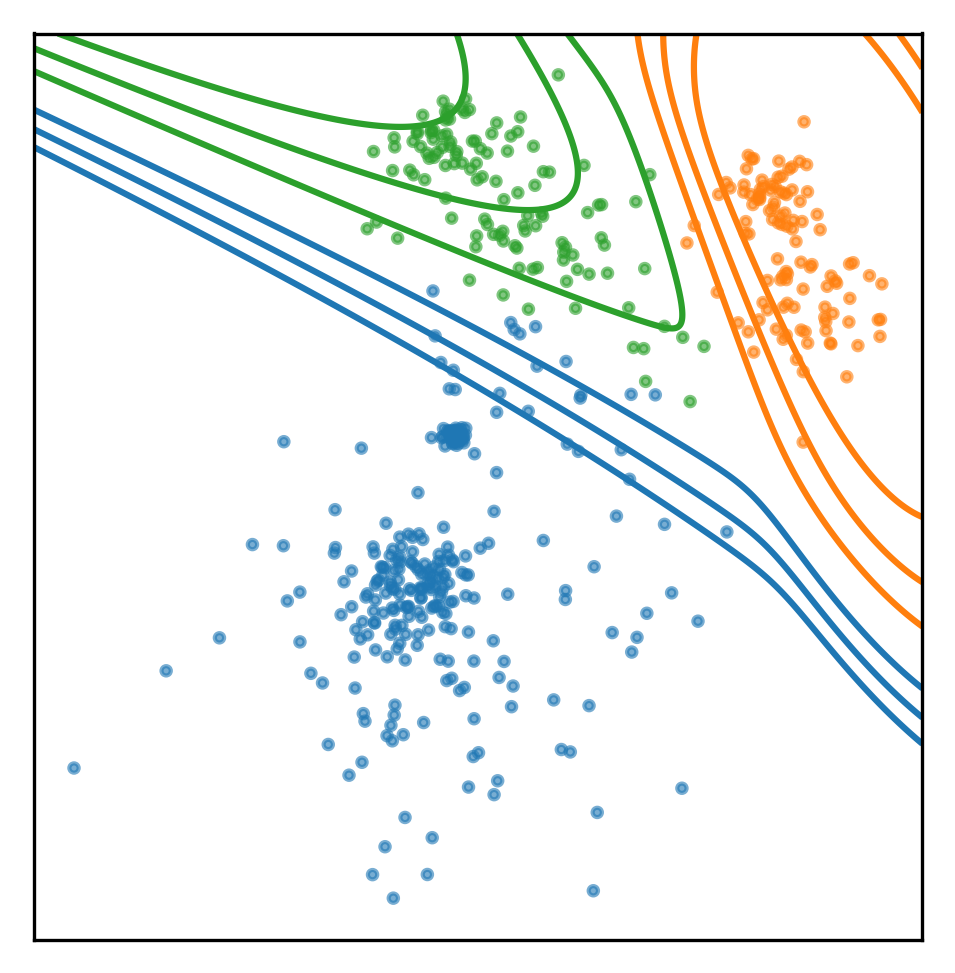
So I can basically get two kinds of probability estimates from this model. I can get the probability of a point belonging to each of the components, I can get that with predict_proba. Predict_proba gives you basically for a given point, the posterior of which component it was probably generated from. The model is the same as the QDA classifier that we saw last time. So basically, it’s just saying, given these three Gaussian, which Gaussian is it likely to come from.
You could’ve also set the model to joint likelihood, and see how likely is it to observe X or do a core samples, which will give me a log likelihood of each individual sample stating which of the samples look strange.
So the shape of the result is number of samples times number of components. So for each of the component, I say given the data that was generated by this mixture, how likely is it that it was generated by this particular component.
For the blue components it would probably be one and near zero for the other two components.
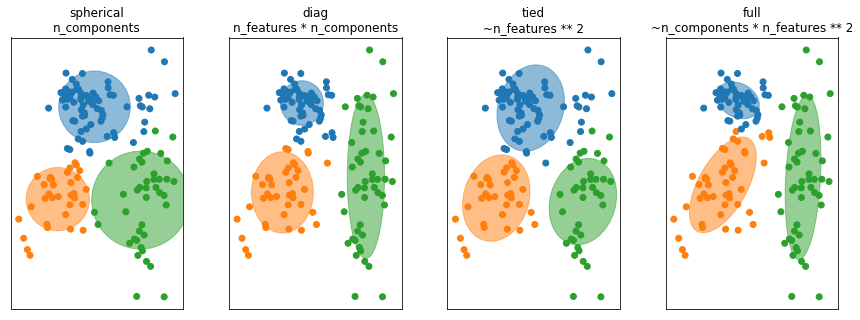
Covariance restrictions¶
So thing that’s commonly done in higher dimensions is to restrict the shape of the covariance matrix and thereby the shape of the clusters. So basically, we’re taking a step back and become a little bit closer to KMeans again.
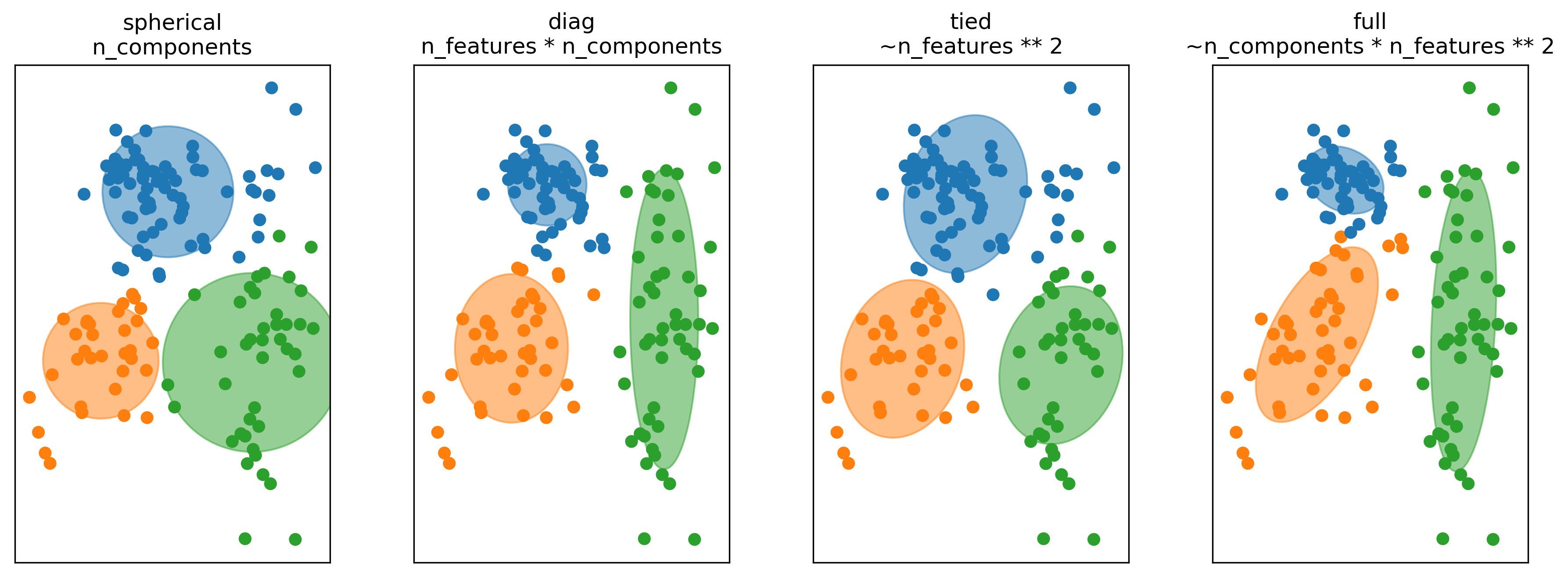
There’s four most common options to restrict the covariance matrix in scikit-learn. For each of these, I give the number of parameters of the covariance matrix that you’re learning. So for spherical, all of the components are spherical but each has their own covariance. So I have one covariance number for each of the components. So it’s like sigma i times the unit matrix. And then it looks like this, if I fit it to this dataset here. This is like very few numbers to learn so I need very little data. Also, this not very flexible.
For diagonal, I learned a diagonal covariance matrix. So for each of the components, I have number of features many degrees of freedom. So that means I can learn ellipsoids that are access parallel. So along the x-axis I have a variance and variance along the y-axis. This doesn’t grow quadratically with a number of features so that’s sort of still reasonably behaved and that’s something used quite commonly.
Tied means that we assume that all the clusters have the same covariance matrix. So this is the same as what we did with like linear discriminate analysis. In linear discriminate analysis was basically the supervisor version of this, where we shared the covariance matrix between all the classes while here, we share the covariance matrix between all the components. So then we only need to learn one covariance matrix. But it’s a symmetric matrix, but the number of parameters still grows as the number feature squared. This is probably something you only want to use, if you have some a priori knowledge that the clusters should sort of have a similar shape.
The full is sort of the default that I talked about. In this, you have a full covariance matrix independently for each of the clusters. So this is the most flexible, but this is also the hardest to fit. So in a sense here, you can think of this as control overfitting. So you could actually overfit the density model. If you give the model too much flexibility, it could learn a two complicated model that doesn’t really model the data well, in particular in very high dimensions.
In high dimensions or with few samples, fitting the whole (n_features ** 2) covariance matrix can be unstable. We can restric it to be spherical, diagonal, tied or full.
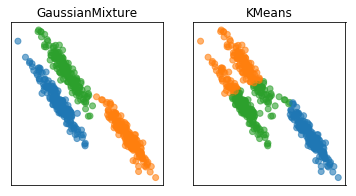
GMM vs KMeans¶
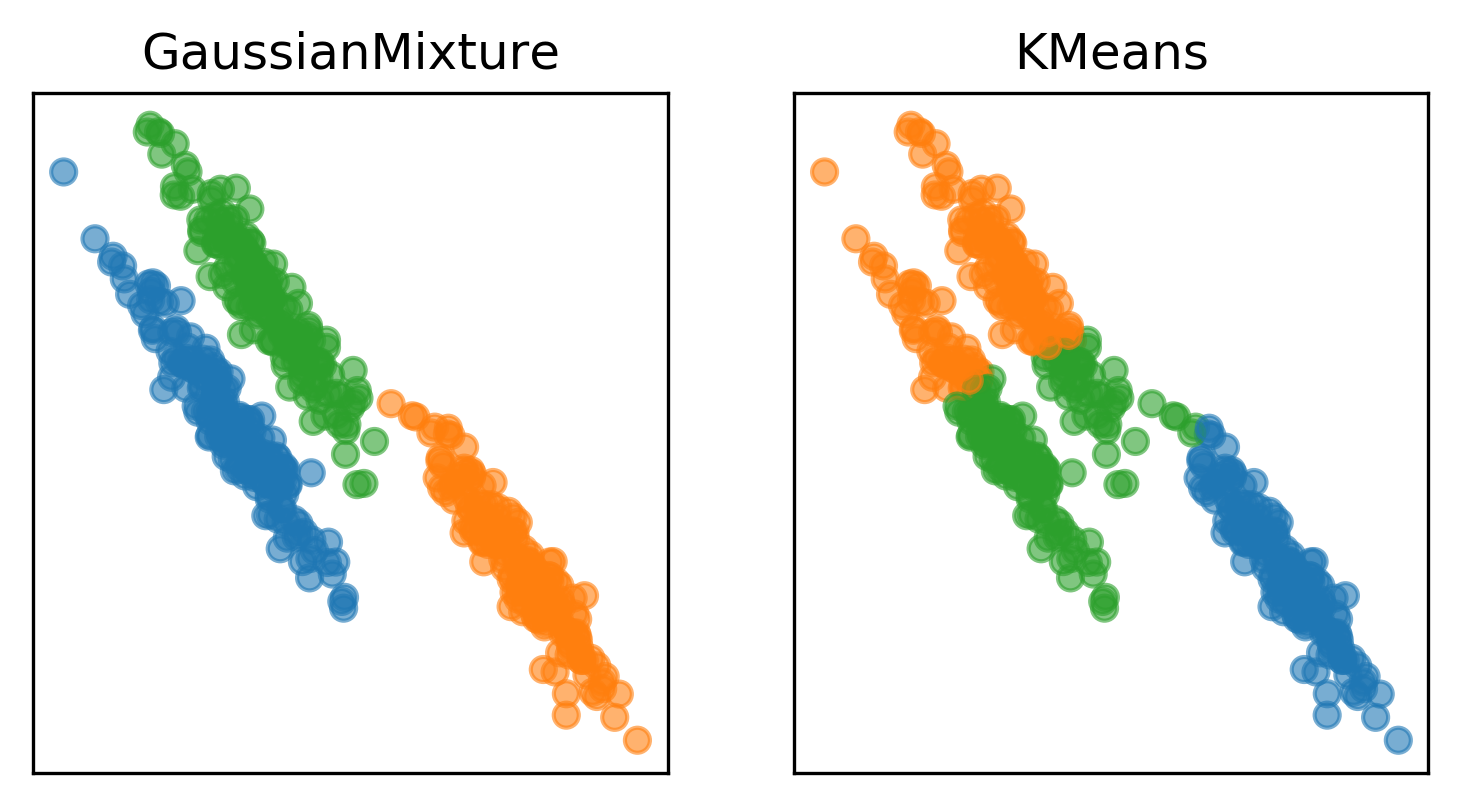
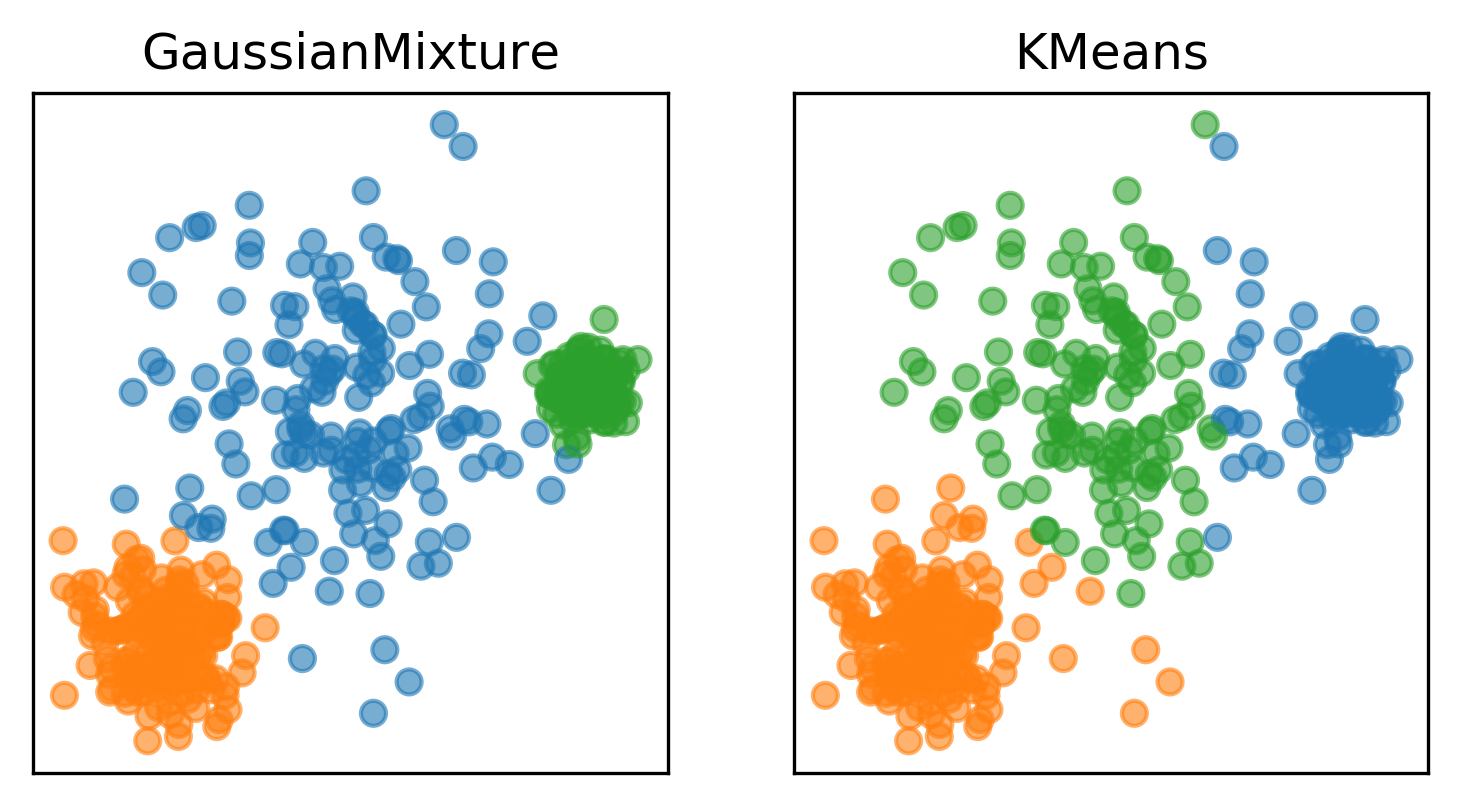
Here are two of the cases that KMeans failed, but the Gaussian mixture model can learn the covariance structure of these components and below, it can learn the variance.
Obviously, I drew this data synthetically from Gaussians so the data is actually a mixture of three Gaussians and I specified fit three Gaussians to it so it’s kind of obvious that it’s going to work.
In the real world, your data will not be generated by Gaussian and you won’t know how many components there might be.
GMM can be more unstable, is more expensive to compute.
Summary¶
KMeans Classic, simple. Only convex cluster shapes, determined by cluster centers. –
Agglomerative Can take input topology into account, can produce hierarchy. –
DBSCAN Arbitrary cluster shapes, can detect outliers, often very different sized clusters. –
Gaussian Mixture Models Can model covariance, soft clustering, can be hard to fit.
The most classical clustering algorithm is KMeans. It’s quite simple. It’s nice, because they have cluster centers, and the cluster centers represent your clusters. But it’s very restricted in terms of the shape of each cluster center. And it’s sort of an approximate algorithm that depends on initialization. So if you initialize differently, you might get different results.
Agglomerative is kind of nice, because it can take the input topology into account and it can produce the hierarchy. If you have not that many data points looking at the dendogram might be very helpful.
DBSCAN is great because it can find arbitrarily shaped clusters and it can also detect outliers. The downside is that you need to specify two parameters that are sort of not so obvious to pick.
And finally, there’s Gaussian mixture models, which are sort of an upgrade of KMeans. They can model covariance. You can do soft clustering, in that you can say how likely does it comes from a particular component, so you don’t hard assign each point to a particular component. It gives you a parametric density model, which is nice. But it can be hard to fit if you want to fit the full covariance matrix. If you only find the diagonal covariance matrix, it’s not so bad.
Gaussian mixture models require multiple initializations possibly, and they’re like a local search procedure.
KMeans requires initialization, as do GMMs.
.center[
 .smaller[
http://scikit-learn.org/dev/auto_examples/cluster/plot_cluster_comparison.html]
]
.smaller[
http://scikit-learn.org/dev/auto_examples/cluster/plot_cluster_comparison.html]
]
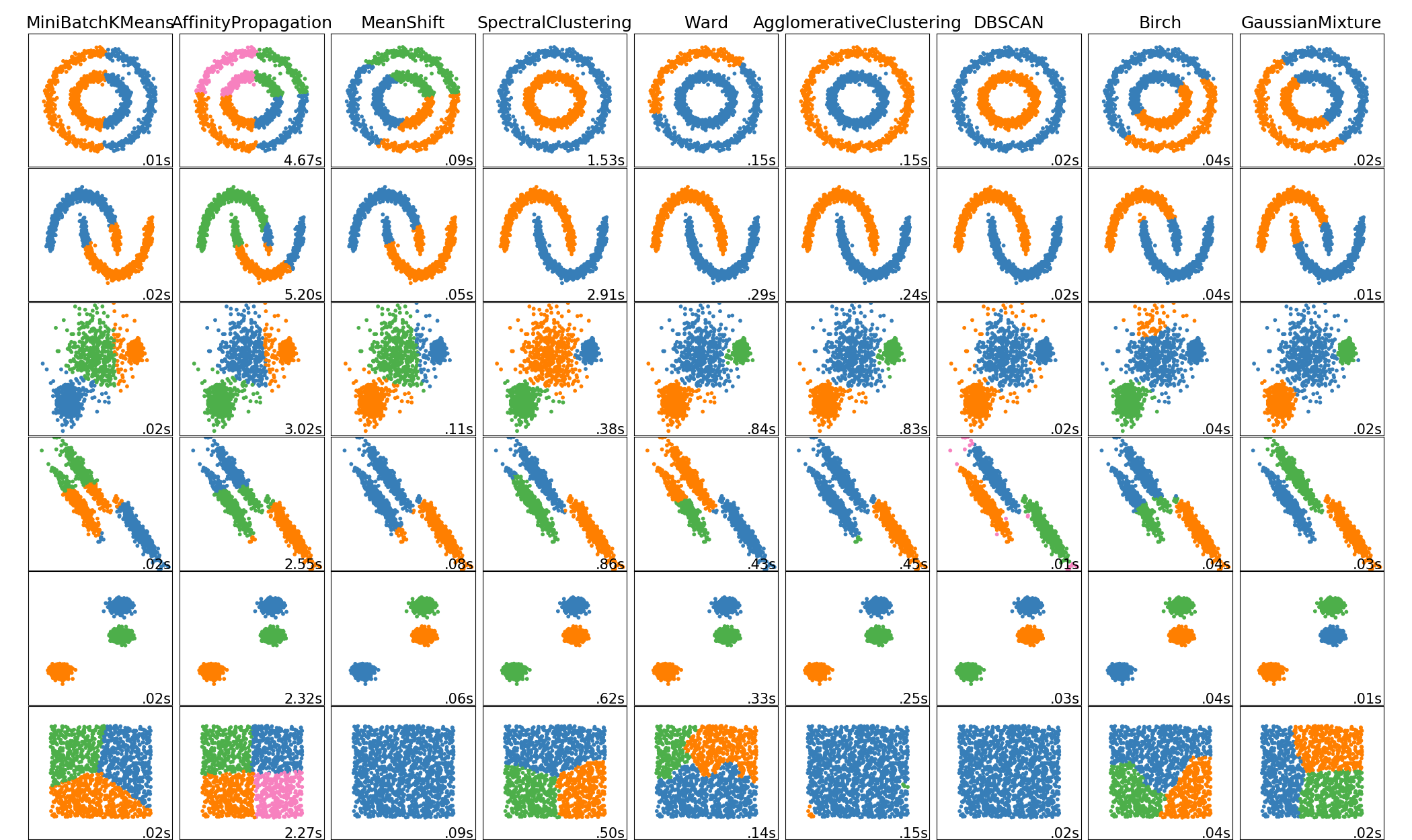
There’s this example on the scikit-learn website which shows a range of different clustering algorithms. So there’s KMeans, affinity propagation, mean shift, spectral clustering, ward, agglomerative clustering, DBSCAN, Birach and Gaussian mixtures.
So you can sort of see what kind of problems they work with or not work with. Though this is 2D and things behave very, very differently in 2D than they behave in higher dimensions.
All of these algorithms have parameters and adjusting these parameters is really tricky. Another question that you should ask yourself is, while some of these can get like complex cluster shapes, like, DBSCAN and agglomerative were able to get these two circles and these two bananas, KMeans and the Gaussian mixtures can do that. But the question is, is your data set actually going to look like this or is it going to look like this?
I think in in the real world data sets are much more likely to look something like this.
Questions ?¶
import numpy as np
import matplotlib.pyplot as plt
% matplotlib inline
plt.rcParams["savefig.dpi"] = 300
plt.rcParams["savefig.bbox"] = "tight"
np.set_printoptions(precision=3, suppress=True)
import pandas as pd
from sklearn.model_selection import train_test_split, cross_val_score
from sklearn.pipeline import make_pipeline
from sklearn.preprocessing import scale, StandardScaler
from matplotlib import colors
# with this color norm we can do discrete scatter sensibly
# norm = colors.BoundaryNorm(boundaries=np.arange(11), ncolors=10)
def scatter_tab(x, y, c, ax=None, **kwargs):
if ax is None:
ax = plt.gca()
ax.scatter(x, y, c=plt.cm.tab10(c), **kwargs)
from sklearn.datasets import make_blobs
from sklearn.cluster import KMeans
X, y = make_blobs(centers=4, random_state=1)
km = KMeans(n_clusters=5, random_state=0)
km.fit(X)
print(km.cluster_centers_.shape)
print(km.labels_.shape)
# predict is the same as labels_ on training data
# but can be applied to new data
print(km.predict(X).shape)
scatter_tab(X[:, 0], X[:, 1], c=km.labels_)
plt.gca().set_aspect("equal")
plt.xticks(())
plt.yticks(())
plt.savefig("images/kmeans_api.png")
(5, 2)
(100,)
(100,)

rng = np.random.RandomState(42)
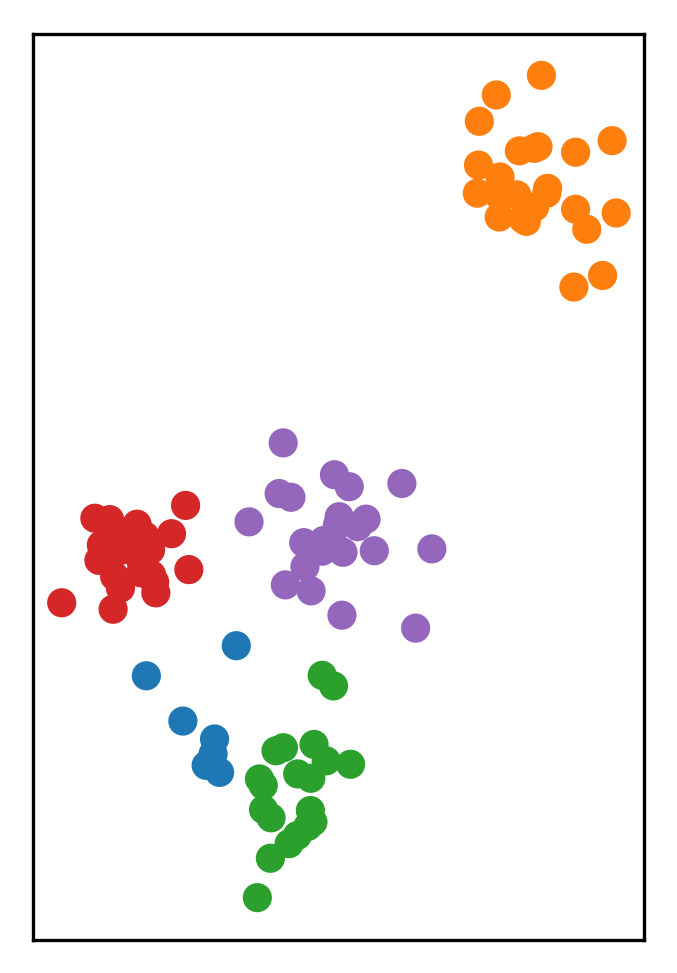
X, y = make_blobs(n_samples=500, centers=10, random_state=rng, cluster_std=[rng.gamma(1) for i in range(10)])
plt.scatter(X[:, 0], X[:, 1], s=5, alpha=.6)
plt.gca().set_aspect("equal")
#plt.scatter(X[:, 0], X[:, 1], c=plt.cm.Vega10(y), s=5, alpha=.6)
xlim = plt.xlim()
ylim = plt.ylim()
km = KMeans(n_clusters=5)
km.fit(X)
xs = np.linspace(xlim[0], xlim[1], 1000)
ys = np.linspace(ylim[0], ylim[1], 1000)
xx, yy = np.meshgrid(xs, ys)
pred = km.predict(np.c_[xx.ravel(), yy.ravel()])
plt.xlim(xlim)
plt.ylim(ylim)
plt.contourf(xx, yy, pred.reshape(xx.shape), alpha=.2, cmap='Accent')
plt.contour(xx, yy, pred.reshape(xx.shape), colors='k')
plt.scatter(X[:, 0], X[:, 1], s=8, alpha=.6, c=km.labels_, cmap='Accent')
centers = km.cluster_centers_
plt.scatter(centers[:, 0], centers[:, 1], s=55, cmap='Accent', marker="^", c=range(km.n_clusters), edgecolor='k')
plt.gca().set_aspect("equal")
plt.xticks(())
plt.yticks(())
plt.savefig("images/cluster_shapes_2.png")
rng = np.random.RandomState(3)
X, y = make_blobs(n_samples=1000, centers=20, random_state=rng, cluster_std=[rng.gamma(1) for i in range(20)])
plt.scatter(X[:, 0], X[:, 1], s=5, alpha=.6)
plt.gca().set_aspect("equal")
#plt.scatter(X[:, 0], X[:, 1], c=plt.cm.Vega10(y), s=5, alpha=.6)
xlim = plt.xlim()
ylim = plt.ylim()
km = KMeans(n_clusters=15)
km.fit(X)
xs = np.linspace(xlim[0], xlim[1], 1000)
ys = np.linspace(ylim[0], ylim[1], 1000)
xx, yy = np.meshgrid(xs, ys)
pred = km.predict(np.c_[xx.ravel(), yy.ravel()])
plt.xlim(xlim)
plt.ylim(ylim)
plt.contourf(xx, yy, pred.reshape(xx.shape), alpha=.2, cmap='Accent', levels=np.arange(15 + 1))
plt.contour(xx, yy, pred.reshape(xx.shape), colors='k', levels=np.arange(15 + 1))
plt.scatter(X[:, 0], X[:, 1], s=8, alpha=.6, c=km.labels_, cmap='Accent')
centers = km.cluster_centers_
plt.scatter(centers[:, 0], centers[:, 1], s=55, cmap='Accent', marker="^", c=range(km.n_clusters), edgecolor='k')
plt.gca().set_aspect("equal")
plt.xticks(())
plt.yticks(())
plt.savefig("images/cluster_shapes_1.png")
Agglomerative Clustering¶
from sklearn.cluster import AgglomerativeClustering
from sklearn.metrics import adjusted_rand_score
import itertools
ari_min = 3
# find a random state that makes them most dissimilar ... just for illustration
for i in range(1000):
labels = []
for linkage in ["complete", "average", 'ward']:
agg = AgglomerativeClustering(n_clusters=5, linkage=linkage)
rng = np.random.RandomState(i)
X, y = make_blobs(n_samples=100, centers=10, random_state=rng, cluster_std=[rng.gamma(2) for i in range(10)])
labels.append(agg.fit_predict(X))
ari = 0
for j, k in itertools.combinations(labels, 2):
ari += adjusted_rand_score(j, k)
if ari_min > ari:
ari_min = ari
print(i, ari)
0 1.0085065985512043
7 0.999090616692345
85 0.818683326528442
325 0.7794265903808125
484 0.5518711454498323
rng = np.random.RandomState(325)
X, y = make_blobs(n_samples=100, centers=10, random_state=rng, cluster_std=[rng.gamma(2) for i in range(10)])
plt.scatter(X[:, 0], X[:, 1], s=5, alpha=.6)
plt.gca().set_aspect("equal")
#plt.scatter(X[:, 0], X[:, 1], c=plt.cm.Vega10(y), s=5, alpha=.6)
xlim = plt.xlim()
ylim = plt.ylim()
from sklearn.cluster import AgglomerativeClustering
fig, axes = plt.subplots(1, 4, figsize=(8, 3), subplot_kw={"xticks":(), "yticks": ()})
for ax, linkage in zip(axes, ['single', "average", "complete", 'ward']):
agg = AgglomerativeClustering(n_clusters=5, linkage=linkage)
agg.fit(X)
ax.scatter(X[:, 0], X[:, 1], c=plt.cm.tab10(agg.labels_), alpha=.7)
ax.set_title(linkage)
ax.set_aspect("equal")
print("{} : {}".format(linkage, np.sort(np.bincount(agg.labels_))[::-1]))
plt.savefig("images/merging_criteria.png")
single : [96 1 1 1 1]
average : [82 9 7 1 1]
complete : [50 24 14 11 1]
ward : [31 30 20 10 9]
DBSCAN¶
from sklearn.cluster import DBSCAN
min_samples = 4
eps = 2.5
plt.figure(figsize=(4, 5))
dbscan = DBSCAN(min_samples=min_samples, eps=eps)
colors = ['r', 'g', 'b', 'k', 'cyan']
markers = ['o', '^', 'v']
# get cluster assignments
clusters = dbscan.fit_predict(X)
print("min_samples: %d eps: %f cluster: %s"
% (min_samples, eps, clusters))
if np.any(clusters == -1):
c = ['w'] + colors
clusters = clusters + 1
else:
c = colors
m = markers
c = np.array(c)
plt.scatter(X[:, 0], X[:, 1], c=c[clusters], s=10, edgecolor="k")
inds = dbscan.core_sample_indices_
# vizualize core samples and clusters.
if len(inds):
plt.scatter(X[inds, 0], X[inds, 1], c=c[clusters[inds]],
s=30, edgecolor="k")
plt.title("min_samples: %d eps: %.1f"
% (min_samples, eps))
plt.xticks(())
plt.yticks(())
plt.savefig("images/dbscan_algo.png")
min_samples: 4 eps: 2.500000 cluster: [-1 -1 0 0 0 0 0 1 -1 2 0 0 0 2 0 1 0 0 2 2 3 0 0 2
0 -1 0 -1 -1 0 2 2 0 -1 0 4 0 2 2 0 2 2 -1 0 -1 4 3 2
0 0 -1 0 0 0 0 0 0 0 0 -1 0 -1 -1 0 3 1 4 -1 -1 2 2 3
-1 2 0 0 -1 0 -1 -1 3 -1 2 -1 0 4 0 0 -1 0 1 -1 2 0 0 2
-1 0 -1 0]
rng = np.random.RandomState(3)
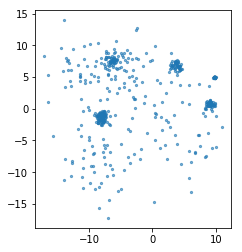
X, y = make_blobs(n_samples=500, centers=10, random_state=rng, cluster_std=[rng.gamma(1.5) for i in range(10)])
plt.scatter(X[:, 0], X[:, 1], s=5, alpha=.6)
plt.gca().set_aspect("equal")
#plt.scatter(X[:, 0], X[:, 1], c=plt.cm.Vega10(y), s=5, alpha=.6)
xlim = plt.xlim()
ylim = plt.ylim()
plt.xticks(())
plt.yticks(())
plt.savefig("images/mm_examples_1.png")
from sklearn.mixture import GaussianMixture
gmm = GaussianMixture(n_components=3)
gmm.fit(X)
print(gmm.means_)
print(gmm.covariances_)
[[-2.286 -4.674]
[ 8.685 5.206]
[-0.377 6.947]]
[[[ 6.651 2.066]
[ 2.066 13.759]]
[[ 1.481 -1.1 ]
[-1.1 4.191]]
[[ 5.467 -3.341]
[-3.341 4.666]]]
assignment = gmm.predict(X)
plt.scatter(X[:, 0], X[:, 1], s=5, alpha=.6, c=plt.cm.tab10(assignment))
plt.gca().set_aspect("equal")
plt.xticks(())
plt.yticks(())
plt.savefig("images/mm_examples_2.png")

# log probability under the model
print(gmm.score(X))
print(gmm.score_samples(X).shape)
-5.508383131660925
(500,)
xs = np.linspace(xlim[0], xlim[1], 1000)
ys = np.linspace(ylim[0], ylim[1], 1000)
xx, yy = np.meshgrid(xs, ys)
pred = gmm.predict_proba(np.c_[xx.ravel(), yy.ravel()])
plt.scatter(X[:, 0], X[:, 1], s=5, alpha=.6, c=plt.cm.tab10(assignment))
plt.gca().set_aspect("equal")
plt.xticks(())
plt.yticks(())
levels = [.9, .99, .999, 1]
for color, component in zip(range(3), pred.T):
plt.contour(xx, yy, component.reshape(xx.shape), colors=[plt.cm.tab10(color)], levels=levels)
plt.savefig("images/prob_est1.png")

scores = gmm.score_samples(np.c_[xx.ravel(), yy.ravel()])
plt.scatter(X[:, 0], X[:, 1], s=5, alpha=.6, c=plt.cm.tab10(assignment))
plt.gca().set_aspect("equal")
plt.xticks(())
plt.yticks(())
scores = np.exp(scores)
plt.contour(xx, yy, scores.reshape(xx.shape), levels=np.percentile(scores, np.linspace(0, 100, 8))[1:-1])
plt.savefig("images/prob_est2.png")

rnd = np.random.RandomState(4)
X1 = rnd.normal(size=(50, 2)) + rnd.normal(scale=10, size=(1, 2))
X2 = rnd.normal(scale=(1, 5), size=(50, 2)) + rnd.normal(scale=(10, 1), size=(1, 2))
X3 = np.dot(rnd.normal(scale=(1, 2), size=(50, 2)), [[1, -1], [1, 1]]) + rnd.normal(scale=(10, 1), size=(1, 2))
plt.plot(X1[:, 0], X1[:, 1], 'o', label='x1')
plt.plot(X2[:, 0], X2[:, 1], 'o', label='x2')
plt.plot(X3[:, 0], X3[:, 1], 'o', label='x3')
plt.gca().set_aspect("equal")
plt.legend()
<matplotlib.legend.Legend at 0x7f43a0918828>

import matplotlib.pyplot as plt
import matplotlib as mpl
import numpy as np
from sklearn.mixture import GaussianMixture
def make_ellipses(gmm, ax):
for n in range(gmm.n_components):
if gmm.covariance_type == 'full':
covariances = gmm.covariances_[n]
elif gmm.covariance_type == 'tied':
covariances = gmm.covariances_
elif gmm.covariance_type == 'diag':
covariances = np.diag(gmm.covariances_[n])
elif gmm.covariance_type == 'spherical':
covariances = np.eye(gmm.means_.shape[1]) * gmm.covariances_[n]
v, w = np.linalg.eigh(covariances)
u = w[0] / np.linalg.norm(w[0])
angle = np.arctan2(u[1], u[0])
angle = 180 * angle / np.pi # convert to degrees
v = 2. * np.sqrt(2.) * np.sqrt(v)
ell = mpl.patches.Ellipse(gmm.means_[n], v[0], v[1],
180 + angle, color=plt.cm.tab10(n))
ell.set_clip_box(ax.bbox)
ell.set_alpha(0.5)
ax.add_artist(ell)
rnd = np.random.RandomState(4)
X1 = rnd.normal(size=(50, 2)) + rnd.normal(scale=10, size=(1, 2))
X2 = rnd.normal(scale=(1, 5), size=(50, 2)) + rnd.normal(scale=(10, 1), size=(1, 2))
X3 = np.dot(rnd.normal(scale=(1, 2), size=(50, 2)), [[1, -1], [1, 1]]) + rnd.normal(scale=(10, 1), size=(1, 2))
X = np.vstack([X1, X2, X3])
# Try GMMs using different types of covariances.
estimators = [GaussianMixture(n_components=3, covariance_type=cov_type, max_iter=20, random_state=0)
for cov_type in ['spherical', 'diag', 'tied', 'full']]
n_estimators = len(estimators)
fig, axes = plt.subplots(1, 4, figsize=(15, 5))
titles = ("spherical\nn_components", "diag\nn_features * n_components",
"tied\n~n_features ** 2", "full\n~n_components * n_features ** 2")
for ax, title, estimator in zip(axes, titles, estimators):
estimator.fit(X)
make_ellipses(estimator, ax)
pred = estimator.predict(X)
ax.scatter(X[:, 0], X[:, 1], c=plt.cm.tab10(pred))
ax.set_xticks(())
ax.set_yticks(())
ax.set_title(title)
ax.set_aspect("equal")
plt.savefig("images/covariance_types.png")
GMM vs KMeans¶
n_samples = 500
blobs = make_blobs(n_samples=n_samples, random_state=8)
# Anisotropicly distributed data
random_state = 170
X, y = make_blobs(n_samples=n_samples, random_state=random_state)
transformation = [[0.6, -0.6], [-0.4, 0.8]]
X_aniso = np.dot(X, transformation)
aniso = (X_aniso, y)
# blobs with varied variances
varied = make_blobs(n_samples=n_samples,
cluster_std=[1.0, 2.5, 0.5],
random_state=random_state)
fig, axes = plt.subplots(1, 2, figsize=(6, 3))
for ax, model in zip(axes, [GaussianMixture(n_components=3), KMeans(n_clusters=3)]):
model.fit(X_aniso)
ax.scatter(X_aniso[:, 0], X_aniso[:, 1], c=plt.cm.tab10(model.predict(X_aniso)), alpha=.6)
ax.set_xticks(())
ax.set_yticks(())
ax.set_title(type(model).__name__)
plt.savefig("images/gmm_vs_kmeans_1.png")
X_varied = varied[0]
fig, axes = plt.subplots(1, 2, figsize=(6, 3))
for ax, model in zip(axes, [GaussianMixture(n_components=3), KMeans(n_clusters=3)]):
model.fit(X_varied)
ax.scatter(X_varied[:, 0], X_varied[:, 1], c=plt.cm.tab10(model.predict(X_varied)), alpha=.6)
ax.set_xticks(())
ax.set_yticks(())
ax.set_title(type(model).__name__)
plt.savefig("images/gmm_vs_kmeans_2.png")

from scipy import stats
line = np.linspace(-8, 6, 200)
norm1 = stats.norm(0, 1)
norm2 = stats.norm(3, 2)
norm3 = stats.norm(-3.4, .5)
fig, axes = plt.subplots(3, subplot_kw={'xticks': (), 'yticks': ()})
axes[0].plot(line, norm1.pdf(line))
axes[1].plot(line, norm2.pdf(line))
axes[2].plot(line, norm3.pdf(line))
plt.savefig("images/gmm1.png")
plt.figure(figsize=(6, 2))
plt.plot(line, .5 * norm1.pdf(line) + .3 * norm2.pdf(line) + .2 * norm3.pdf(line))
plt.xticks(())
plt.yticks(())
plt.savefig("images/gmm2.png")
rng = np.random.RandomState(1)
X, y = make_blobs(n_samples=500, centers=10, random_state=rng, cluster_std=[rng.gamma(1.5) for i in range(10)])
plt.scatter(X[:, 0], X[:, 1], s=5, alpha=.6)
plt.gca().set_aspect("equal")
#plt.scatter(X[:, 0], X[:, 1], c=plt.cm.Vega10(y), s=5, alpha=.6)
xlim = plt.xlim()
ylim = plt.ylim()
from sklearn.mixture import BayesianGaussianMixture
from sklearn.metrics import adjusted_rand_score
rng = np.random.RandomState(1)
X, y = make_blobs(n_samples=5000, centers=10, random_state=rng, cluster_std=[rng.gamma(1.5) for i in range(10)])
fig, axes = plt.subplots(2, 4, figsize=(10, 5))
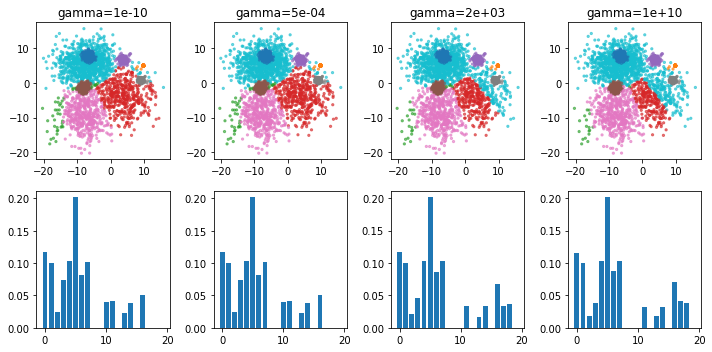
gammas = np.logspace(-10, 10, 4)
for gamma, ax in zip(gammas, axes.T):
print(gamma)
bgmm = BayesianGaussianMixture(n_components=20, weight_concentration_prior=gamma, random_state=1).fit(X)
ax[0].scatter(X[:, 0], X[:, 1], s=5, alpha=.6, c=plt.cm.tab10(bgmm.predict(X)))
print(np.bincount(bgmm.predict(X)))
print(adjusted_rand_score(y, bgmm.predict(X)))
ax[0].set_title("gamma={:.0e}".format(gamma))
ax[1].bar(range(20), bgmm.weights_)
plt.tight_layout()
1e-10
/home/andy/checkout/scikit-learn/sklearn/mixture/base.py:265: ConvergenceWarning: Initialization 1 did not converge. Try different init parameters, or increase max_iter, tol or check for degenerate data. % (init + 1), ConvergenceWarning)
[ 647 503 44 454 518 1042 458 517 0 0 277 74 0 15
159 0 292]
0.7096662658394226
0.0004641588833612782
/home/andy/checkout/scikit-learn/sklearn/mixture/base.py:265: ConvergenceWarning: Initialization 1 did not converge. Try different init parameters, or increase max_iter, tol or check for degenerate data. % (init + 1), ConvergenceWarning)
[ 647 503 44 454 518 1042 458 517 0 0 277 74 0 15
159 0 292]
0.7096662658394226
2154.4346900318865
/home/andy/checkout/scikit-learn/sklearn/mixture/base.py:265: ConvergenceWarning: Initialization 1 did not converge. Try different init parameters, or increase max_iter, tol or check for degenerate data. % (init + 1), ConvergenceWarning)
[ 646 503 27 306 518 1041 483 517 0 0 0 62 0 0
35 0 443 154 265]
0.6996760223489021
10000000000.0
/home/andy/checkout/scikit-learn/sklearn/mixture/base.py:265: ConvergenceWarning: Initialization 1 did not converge. Try different init parameters, or increase max_iter, tol or check for degenerate data. % (init + 1), ConvergenceWarning)
[ 644 503 19 233 518 1040 494 516 0 0 0 53 0 0
31 0 460 220 269]
0.6996790637679039